

یکی از چالش های اصلی در نظارت یا سیستم های فتوگرامتری مجهز به پهپادهای مولتی روتور اثرات لرزش ناشی از وزش باد، اغتشاش و پیچ پهپاد است. برای رسیدگی به این چالش، بسیاری از سیستم های پهپادهای مولتی روتور از یک گیمبال استفاده می کنند که سنسورهای بینایی را از بدنه پرنده های بدون سرنشین جدا می کند، در نتیجه این اثرات را از بین می روند. تصاویر گرفته شده توسط پهپاد در این مرحله در نرم افزار مثلث بندی هوایی یا SFM برای تولید یک مدل سه بعدی پردازش می شوند. این مدل سه بعدی هندسه آزاد می تواند بعدا با استفاده از نقاط کنترل زمینی (GCP) ژئو رفرنس شود. محصول جانبی این فرآیند، برآورد غیر مستقیم موقعیت و دوران تصاویر است که همچنین پارامتر توجیه خارجی (EOP) نامیده می شود.
در رویکرد مستقیم ژئو رفرنسینگ در محصول Geo-Photomap، EOP تصاویر با استفاده از GPS/IMU روی صفحه نمایش تخمین زده می شود. این رویکرد نیاز به یک رابطه سفت و سخت بین GPS/IMU و دوربین تصویر برداری دارد، بنابراین دوربین باید به طور مستقیم به بدنه هواپیماهای بدون سرنشین متصل شود، نه یک گیمبال. همچنین، چالش ارتعاشات، اغتشاش و پیچ پهپاد به دلیل استفاده نکردن از گیمبال باید به درستی مورد توجه قرار گیرد.
ما دوران تصویر برآورد شده را از هر دو روش غیر مستقیم و مستقیم مقایسه کردیم. شکل 1 نشان دهنده زوایای دوران برای یک بلوک عکسبرداری با بیش از 1000 تصویر جمع آوری شده با استفاده از دو رویکرد مستقیم و غیر مستقیم می باشد. همانطور که دیده می شود، در هردو حالت، زوایای Yaw (Heading) با دقت بالا برآورده شده است که به دلیل اینکه هر دو از موقعیت های مراکز تصویر یا دقت بالایی حاصل شده مقادیر بدست آمده بسیار نزدیک به یکدیگر می باشد. با این حال، این مورد برای زوایای تیلت نیست. در روش غیر مستقیم، زوایای Roll و Pitch (تیلت) در محدوده کمتر از 5 درجه برآورد می شوند، در حالی که با استفاده از برآورد مستقیم، زوایای Roll و Pitch به شدت نشان دهنده دوران پهپاد و نتایج بدست آمده نیز نشان دهنده طیف گسترده ای از تیلت و ارتعاشات می باشد. حال سوال اینست – کدام وضعیت از تیلت درست است؟

ما به این نتیجه رسیدیم که با رویکرد غیر مستقیم، اکثر بسته های نرم افزیاری فتوگرامتری همانطور که در شکل 2 نشان داده شده است، تصاویر را در نادیر با زاویه تیلت کوچک فرض می کنند.
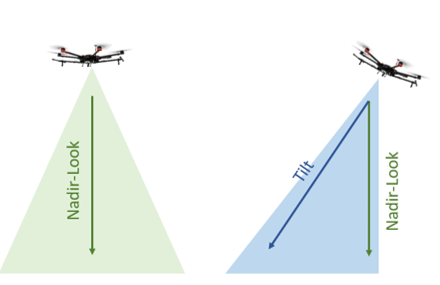
این فرض ممکن است همیشه درست نباشد. این توضیح می دهد که چرا زاویه های Roll و Pitch بدست آمده از رویکرد غیر مستقیم به طور تصادفی بسیار نزدیک به حد آستانه زاوید دید نادیر، به عنوان مثال کوچک تر از 5 درجه هستند. از سوی دیگر، با رویکرد مستقیم، زاویه تیلت تیلت واقعی است.
بنابراین سوال این است – ایا بسته های فتوگرامتری تجاری می توانند از وضعیت واقعی تولید شده با رویکرد مستقیم استفاده کنند؟ پاسخ به این سوال به بسته نرم افزار خاصی بستگی دارد. نرم افزارهایی مانند، Agisoft PhotoScan، SkyLine Photomesh از وضعیت واقعی تصویر ایجاد شده با رویکرد مستقیم پشتیبانی کرده و استفاده می کنند، در حالی که در بسته نرم افزاری Pix4D، این گزینه هنوز موجود نیست.
منبع: www.geodetics.com
مطالب مرتبط:
۱. چرا در هواپیمای سرنشین دار با دوربین متریک و gnss/imu دقیق، بحث حذف نقاط کنترل زمینی مطرح نمی شود.
۲. گروه مشاوران Weaver پهپاد Delair UX11 را برای نقشه برداری بزرگ مقیاس تصویب کرد
۳. بهره گیری کامل از مزایای فناوری UAS




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}