
تعیین موقعیت دقیق از طریق ترکیبی از روش های مختلف GNSS
در حال حاضر ۴ سامانه ناوبری ماهواره ای جهانی (GNSS) در دسترس هستند: GLONASS، BeiDou، GPS و Galilieo. ماهواره های این سامانه ها برای تعیین موقعیت مورد استفاده قرار می گیرند و در صورتی که تصحیحات مدار دقیق ماهواره، ساعت و تاخیر فاز کالیبره نشده (UPD) در هنگام بکارگیری روش تعیین موقعیت دقیق (PPP) در دسترس باشند، دقت بسیار بهبود خواهد یافت. Fugro یک شبکه جهانی از ایستگاه های مبنایی که قادر به ردیابی سامانه های GPS، Galileo، GLONASS و BeiDou است را اداره می کند. این شبکه برای محاسبه آنی مدار دقیق ماهواره و تصحیحات ساعت هر چهار پیکربندی برای کاربردهای دریانوردی مورد استفاده قرار می گیرد. این تصحیحات از طریق ۸ ماهواره زمین ثابت و باند L که پوششی جهانی را ایجاد می کنند، به کاربران ارسال می شوند. این مقاله به شرح پیشرفت های اخیر و دقت حاصل از PPP با قدرت تفکیک های ابهام صحیح (IAR) می پردازد.
(By H. Visser, D. Lapucha, J. Tegedor, O. Ørpen and Y. Memarzadeh, Fugro)
سرویس Fugro Marinestar G4 از تمامی چهار پیکربندی ماهواره ای جهانی استفاده می کند. اگرچه، تمامی این چهار پیکربندی توزیع جغرافیایی یکسان و یا تعداد ماهواره های در دسترس همانندی ندارند. بنابراین باید نقاط قوت و ضعف هریک از این پیکربندی ها را در نظر داشته باشیم. حالت ردیابی برای هر GNSS، بر اساس یک زاویه ارتفاعی کمینه ۵ درجه ای، در زیر ارائه شده است:
GPS
در دسامبر ۲۰۱۶، ۳۱ ماهواره GPS در حالت سلامت وجود داشتند. در پیکربندی فعلی، ۱۹ ماهواره بلوک IIF سیگنال های اضافی L2C را نیز ارسال می کنند، که ۳ دسی بل قوی تر از سیگنال L2 به جا مانده است. این اجازه ردیابی بهتر در شرایط مرزی را داده و زمانی که سیگنال L1 مسدود شود، بر روی L2C اثری ندارد (برعکس سیگنال L2 بجا مانده که تحت تاثیر قرار خواهد گرفت). بر مبنای داده های شبکه GNSS Marinestar، روزانه بین ۶ تا ۱۳ ماهواره قابل استفاده هستند. اگرچه، انسداد محلی و تداخل می تواند این مقدار را برای کاربران به کمتر از ۴ ماهواره کاهش دهد، که برای محاسبه موقعیت با استفاده از یک سیستم منفرد کافی نیست. تعیین موقعیت می تواند توسط تداخلات رادیویی کوتاه GPS تحت تاثیر قرار گیرد.
GLONASS
در حال حاضر ۲۴ ماهواره روسی GLONASS و دو ماهواره اضافی امتحانی در دسترس هستند. برخی از ماهواره ها می توانند نویز ساعت بیشتری داشته باشند و برای PPP-RTK قابل استفاده نیستند، بنابراین می توانند از سرویس Marinestar حذف شوند. بین ۴ تا ۱۰ ماهواره GLONASS در هر زمان و در هر جای دنیا برای کاربران قابل رویت هستند. GLONASS می تواند از طریق تداخلات Globalstar یا Iridium تحت تاثیر قرار گیرد، در حالیکه باند L2 می تواند از طریق تداخل رادیویی آماتور نیز دستخوش تغییر شود.
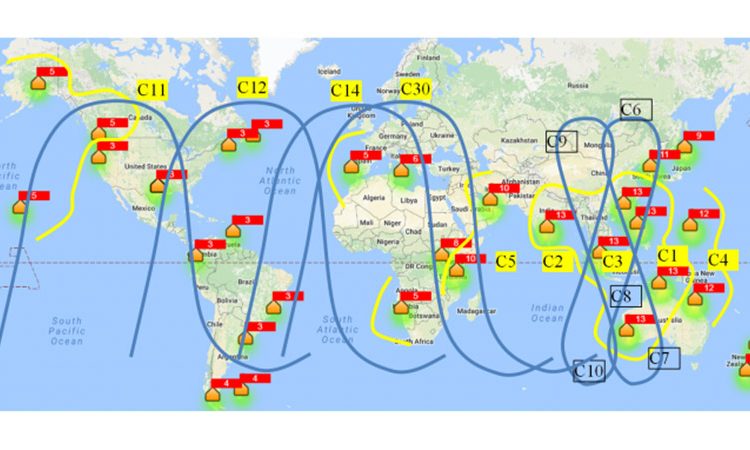
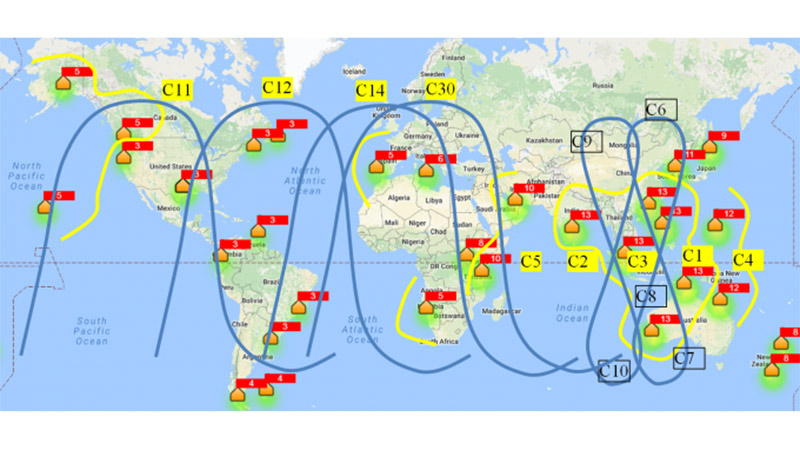 شکل ۱: ۲۱ آگوست ۲۰۱۶٫ Typical maximum number of tracked BeiDou satellites
شکل ۱: ۲۱ آگوست ۲۰۱۶٫ Typical maximum number of tracked BeiDou satellites
BeiDou
سامانه ناوبری چینی BeiDou در حال حاضر پیکربندی ای متشکل از ۱۴ ماهواره عملیاتی است در بردارنده ۵ ماهواره زمین ایستا (GEO) در بالای استوا که چین را پوشش می دهند، ۵ ماهواره مایل زمین آهنگ (IGSO) و چهار ماهواره مدار متوسط زمینی (MEO)، هستند. ماهواره های MEO در هر هفته ۱۳ بار دور زمین می چرخند. در شرق آسیا و استرالیا، بین ۶ تا ۱۴ ماهواره BeiDou همواره قابل رویت هستند. در دسترس بودن MEO در آمریکا بین ۰ تا ۳ ماهواره است (شکل ۱ را ببینید).
Galileo
تا دسامبر ۲۰۱۶، ۱۸ ماهواره Galileo راه اندازی شدند و در حال حاضر ۱۱ تای آنها برای تعیین موقعیت در دسترس هستند. ماهواره های E14 و E18 در یک مدار بیضی قرار داشته و می توانند در آینده مورد بهره برداری واقع شوند. در هر زمان بین ۲ تا ۷ ماهواره Galileo در شبکه قابل رویت هستند. امکان تعیین موقعیت با Galileo در هر نقطه از دنیا در ۶۰% اوقات وجود دارد. در ۱۷ نوامبر ۲۰۱۶، ۴ ماهواره اضافه راه اندازی شدند؛ برنامه ریزی شده است که دوتای این ماهواره ها در آوریل ۲۰۱۷ و دوتای دیگر در ژوئن ۲۰۱۷ در دسترس قرار گیرند. اگرچه، حتی با در دید داشتن تنها دو ماهواره Galileo، Galileo مقداری را برای ساعت های دقیق اضافه می کند و سیگنال های در دسترس را افزایش داده و تعیین موقعیت به کمک Galileo را از طریق سرویس Fugro G4 امکان پذیر می کند.
بر مبنای این مرور، روشن است که هیچ پیکربندی منفردی تعیین موقعیت منسجمی را برای کاربران امکان پذیر نمی سازد. تعداد کلی ماهواره های در دسترس در حال حاضر ۸۰ عدد است (۳۱ GPS، ۲۴ GLONASS، ۱۴ BeiDou، و ۱۱ Galileo)، و زمانی که تمامی این پیکربندی ها در سال ۲۰۲۰ بطور کامل استقرار یابند، این تعداد به ۱۲۱ خواهد رسید (۳۲ GPS، ۲۴ GLONASS، ۳۵ BeiDou، و ۳۰ Galileo). Fugro Marinestar G4+ اندازه گیری هایی از هر چهار پیکربندی (علت نامگذاری آن به G4) را مورد استفاده قرار می دهد و در حال حاضر تصحیحات مدار و ساعت را برای GPS، BeiDou، GLONASS و Galileo منتشر می کند. ارسال تصحیحات ساعت و مدار Galileo در ۱۵ دسامبر ۲۰۱۶ و زمانی که GSA “سرویس اولیه Galileo” را اعلام نمود، آغاز شد. همچنین، G4+ ابهامات مقادیر صحیح GPS را رفع می کند (از این رو +) و امکان تعیین موقعیت PPP-RTK را فراهم می آورد.
تصحیحات ساعت و مدار
سرویس Fugro Marinestar امکان تعیین موقعیت دقیق با استفاده از داده های GNSS بدست آمده از شبکه ایستگاه های مبنای توزیع شده در سطح جهان، را فراهم می آورد. با استفاده از این ایستگاه ها، مدار دقیق هر ماهواره GNSS تعیین می شود و هر دقیقه برای کاربران ارسال می شوند. خطای ساعت ماهواره نیز با یک نرخ به روز رسانی بالا اندازه گیری شده و ارسال می شود.
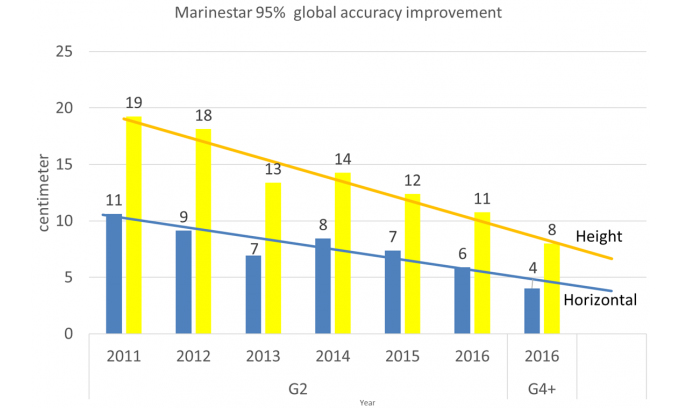
شکل ۲: Improvements of the Marinestar solution in height over the years
از آنجایی که ماهواره های جدیدتر قدرت سیگنال بالاتر، بهره وری آنتن و ردیابی گیرنده بهتری دارند، می توان حداقل ارتفاع را کاهش داد. ارتفاع پایین تر در زمانی که بخش های بزرگی از آسمان تحت تاثیر محوشدگی سیگنال بر اثر افت و خیز ضریب شکست اتمسفر هستند، می تواند یاری رسان باشد.
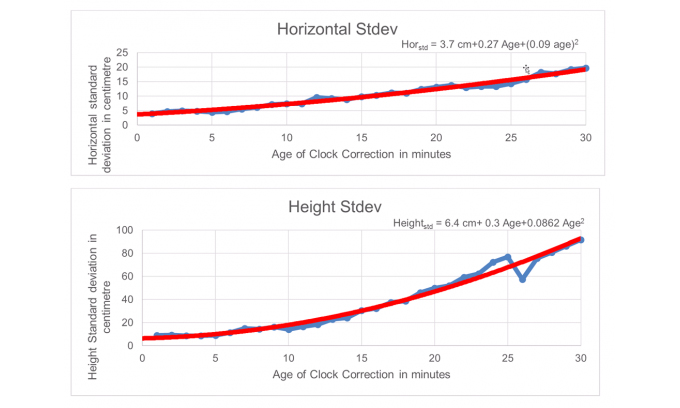
شکل ۳: Horizontal (3a) and vertical (3b) standard deviation in centimetres versus age of correction in minutes for the G2 service in Karratha in NW Australia for 10 January 2015.
به کمک ساعت های روبیدیوم در ماهواره های GPS IIF، در حال حاضر امکان بیشتر کردن عمر تصحیحات ساعت از ۵ تا ۱۰ دقیقه، وجود دارد، و همچنان با وجود تضعیف خفیف موقعیت با افزایش عمر، می توان نتایج خوبی را بدست آورد (شکل ۳ را ببینید). عمر افزایش یافته به غلبه بر محوشدگی باند L (محوشدگی باند L معمولاً کمتر از ۱۰ دقیقه طول می کشد، همانطور که باران شدید ارتباط با ماهواره را قطع می کند) کمک می کند.
در طول زمان، ساعت ماهواره های GNSS می توانند نویز بیشتری پیدا کنند. معمولاً این ماهواره ها مشخصاتی برای کاربردهای عمومی دارند، و برای بکارگیری در سرویس های PPP-RTK با کیفیتی نظیر G4+، با چالش هایی روبرو هستند، چرا که تغییرات ناشی از نویز ممکن است تا ۱۰ سانتیمتر هم برسند. این اعوجاجات ساعتی را می توان در سرویس Marinestar نیز حذف نمود.
مزایای بکارگیری پیکربندی های چندگانه
در دست داشتن چندین پیکربندی مزایایی را در اختیار قرار می دهند. اندازه گیری های بیشتر در مناطق استوایی در هنگام درخشندگی شدید، چنانکه در سال های ۲۰۱۵-۲۰۱۳ در برزیل و آفریقا دیده شده است، بسیار مشکل است. در تعیین موقعیت تنها با GPS، اندازه گیری های بیشتر مشکل هستند، چرا که در نتیجه خرابی های گاه و بیگاه ماهواره ها، همیشه ماهواره های GPS کافی در دسترس نیستند. افزودن اندازه گیری های GLONASS بطور چشم گیری وضعیت را بهبود می بخشد.
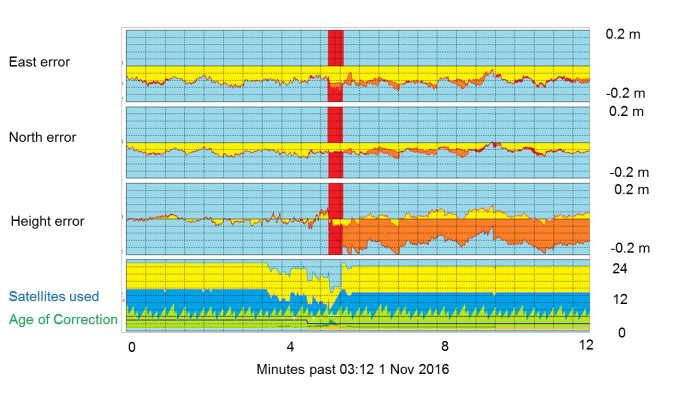
شکل۴: ۱۱ BeiDou satellites (yellow) fixing a GPS L1 jamming position gap (orange) in Perth on 1 November 2016.
افزودن BeiDou به راه حل های PPP در دسترس بودن را افزایش می دهد، اگرچه دقت مداری ماهواره های IGSO و GEOمجموعه BeiDou در نتیجه فاصله بیشتر تا زمین، کمتر است. اگرچه، این ماهواره ها در رفع فواصل داده ای کوتاه مدت ناشی از بطور مثال، تداخل محلی یا مواردی مربوط به تداخل انسدادی GPS L1، که فرکانس ۱٫۵۷۲ مگاهرتزی GPS L1 در آن مسدود می شود اما فرکانس ۱٫۵۶۱ مگاهرتزی BeiDou B1 از آن نجات می یابد، مفید واقع می شوند (شکل ۴). در ارتباط با تداخل Iridium/Globalstar، فرکانس BeiDou B1 را هم چنان می توان ردیابی نمود، در حالیکه سیگنال های GLONASS L1 و تا حدود کمتری GPS L1 می توانند پخش شوند.
PPP در برابر PPP-RTK
در صورتی که تمام طول موج های از گیرنده تا ماهواره قابل تعیین باشند، دقت PPP می تواند بهبود یابد. سرویس Fugro Marinestar، G4+ را با قدرت تفکیک ابهام صحیح GPS و با بکارگیری تصحیحات ماهواره ای UPDهای ایجاد شده در شبکه ای متشکل از ۱۰۰ ایستگاه مبنایی Fugro، ارائه میدهد.
با بکار گرفتن تصحیحات ساعت و مدار دقیق در شبکه ایستگاه های مبنایی با فواصل داخلی ۱۰۰۰ تا ۲۰۰۰ کیلومتر، این امکان وجود دارد که UPDها برای مشاهدات GPS بطور آنی برآورد شوند.
تصحیحات UPD در ارتباطات ماهواره به G4+ کاربران انتشار می یابند. در گیرنده کاربر، تعداد صحیح ابهامات GPS با استفاده از روش LAMBDA حل شده است. سپس ابهامات GPS رفع شده در مدل راه حلی برای محاسبه دقیق تر موقعیت نهایی (G4+) با استفاده از مشاهدات GPS، GLONASS، Galileo و BeiDou بکار گرفته می شوند.
رفع ابهامات صحیح نیازمند اندازه گیری هایی بهتر از PPP سنتی است. مواردی که دقت نهایی را تحت تاثیر قرار می دهند عبارتند از:
- تداخل رادیویی: تداخل رادیویی راه دور که در حالت عادی قابل توجه نیست، تعیین موقعیت را تحت تاثیر قرار می دهد.
- نوع آنتن: آنتن ژئودتیکی با کیفیت یا Choke ring مقاومت بهتری در برابر خطای چند مسیری دارند. اگرچه، در نتیجه ملاحظات عملی یک آنتن marine با مقاومت کمتر در برابر خطای چندمسیری معمولاً ترجیح داده می شود.
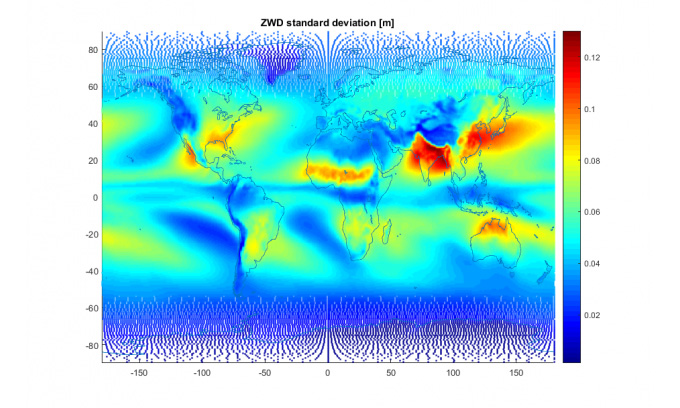
شکل ۵: ۱۲-year variation of the ‘Zenith Wet Delay’ tropospheric error (image courtesy: Sam Storm van Leeuwen).
- خطای تروپسفری: رطوبت بالا و باران های شدید استوایی می توانند منجر به خطاهای دامنه تروپسفری پیش بینی نشده ای شوند (شکل ۵ را ببینید)
- چندمسیری فاز: خطای چندمسیری کد معمولی، عملکرد کد L1 را در دامنه ای بین ۱ تا ۵ متر تحت تاثیر قرار می دهد. چندمسیری فاز در نتیجه نزدیکی بازتاب ها با آنتن، مانند قرارگیری روی یک میله افقی یا نزدیکی به موانع فلزی، بر راه حل های PPP-RTK تاثیر می گذارند.
نتیجه گیری
کیفیت سرویس تعیین موقعیت Fugro Marinestar بطور پیوسته در حال بهبود است. بطور کلی و در نتیجه اختلالات یونوسفری کاهش یافته پس از بیشترین فعالیت خورشیدی، نتایج تعیین موقعیت با GNSS بهتر خواهد شد. دقت معمول راه حل G4+ بهتر از ۴ سانتیمتر در راستای افقی و ۸ سانتیمتر در راستای قائم است. بهبود دقت افقی G4+ PPP-RTK نسبت به PPP G2 بین ۶ تا ۲۷% در راستای افق و ۲-۸% در راستای قائم است. این بهبود در ارتفاع از طریق خطای تروپسفری محدود شده است. تعیین موقعیت با روش PPP-IAR نیز نیازمند توجه بیشتر به تنظیمات آنتن گیرنده و محیط نقشه برداری است.
منبع: gim-international.com
مطالب مرتبط:
۱. گیرنده ماهواره ای ۴۴۰ کانال K5UFO کولیدا
۲. کاربرد GPS در فوتبال: چگونه تیم ها از GPS قابل پوشیدن در جام جهانی روسیه استفاده کردند.
۳. یادداشتی از دکتر نانکلی در آستانه پرتاب اولین ماهواره مدرن GPSIII

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}