
Geo-MMS: از ماموریت پرواز تا برنامه ریزی پرواز هواپیماهای بدون سر نشین
برای تعیین صحیح ماموریت جمع آوری داده ها هنگام استفاده از خانواده Geo-MMS محصولات، باید سه مقدار اساسی شناخته شود:
- ارتفاع مناسب پرواز (AGL)
- جداسازی مناسب نوار پرواز
- سرعت پرواز مناسب
محاسبه این مقادیر در نرم افزار بسیار آسان است، با این حال متوجه شدیم که بیشتر نرم افزارهای موجود برای طراحی هواپیماهای بدون سر نشین تجاری برای ماموریت های فتوگرامتری با استفاده از دوربین ها طراحی شده اند و تقریبا هیچ یک از آنها برای ماموریت های لیدار طراحی نشده اند که نیاز به تنظیمات متفاوتی نسبت به فتوگرامتری دارند.
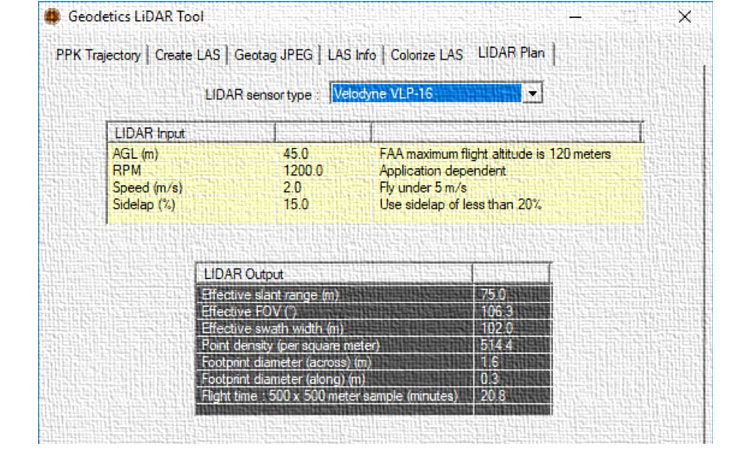
Geodetics اخیرا یک ابزار جدید برنامه ریزی پرواز هواپیمای بدون سر نشین به مجموعه نرم افزارهای ما اضافه کرده است تا مشتریان ما بتوانند به راحتی این مقادیر را برای محاسبه ماموریت های لیدار و برنامه ریزی ماموریت های پرواز محصولات Geo-MMS همان طور که در شکل 1 نشان داده شده است، استفاده کنند.
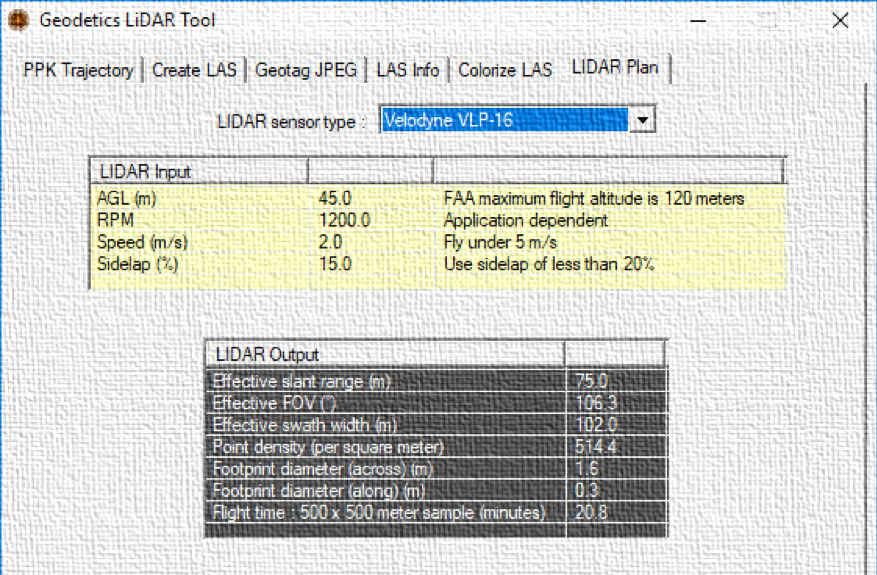
برنامه ریزی پرواز پهپاد لیدار با استفاده از ابزار جدید ما با انتخاب نوع سنسور لیدار در حال شروع برای استفاده است. در حال حاضر این شامل، Velodyne VLP-32C با برد اسمی 200 متر، و همچنین Velodyne VLP-16 و HDL-32C با برد اسمی 100 متر می باشد.
پس از انتخاب لیدار، چهار پارامتر توسط کاربر وارد می شود. ارتفاع پرواز بالاتر از سطح زمین (AGL)، نرخ چرخش لیدار (RPM)، سرعت پرواز (متر بر ثانیه) و پوشش عرضی. درک این پارامترها مهم است، به همین دلیل هر کدام از آن ها در زیر مورد بحث قرار گرفته و توضیح داده شده اند.
ارتفاع پرواز
انتخاب ارتفاع مناسب پرواز، نیازمند درک محیط در منطقه مورد نظر است. در بسیاری از موارد خلبان ارتفاع پرواز را بر اساس برآورد ارتفاع ویژگی های موجود در منطقه، به عنوان مثال درختان، ساختمان ها و غیره، انتخاب می کنند، و “Cushion” در ارتفاع کافی برای جلوگیری از ویژگی ها اضافه شده است. اگر منطقه باز باشد و ویژگی های زیاد در آن وجود نداشته باشد، می توان ارتفاع را بر اساس ویژگی های ارتفاع کمتر مورد علاقه انتخاب کرد. برای پروژه هایی مانند نقشه برداری از راه، استخراج معادن و غیره، هرچه ارتفاع پرواز کمتر باشد، نتیجه بهتری بدست خواهد آمد. برای این موارد، ارتفاع زیر 30 متر را توصیه می کنیم حفظ کنید. در کاربردهایی مانند توپوگرافی، ارتفاع می تواند دلخواه باشد به عنوان مثال 60 متر.
پس از انتخاب ارتفاع پرواز برای یک لیزر اسکنر خاص، برد موثر و زاویه دید (FOV) لیزر توسط نرم افزار تخمین زده می شود. عرض موثر نوار، جدایی بین نوارها را نشان می دهد. این پارامتر به عنوان تابع AGL و پوشش عرضی برآورد می شود. برای اطلاعات بیشتر در مورد تخمین FOV، لطفا ضمیمه را بررسی کنید.
RPM
تنظیم چرخش در هر دقیقه (RPM) سنسور لیدار بر توان نفکیک ابر نقاط تاثیر می گذارد، که به دو شکل قطر ردپا در سراسر و طول مسیر برداشت نشان داده می شود. به طور کلی، تنظیمات RTM کمتر از 600 توصیه نمی شود. برای کاربردهایی مانند جنگل داری، که در آن ما می خواهیم احتمال نفوذ در برگ های درختان را افزایش داده و بازتاب هایی را از تنه درخت یا زمینی که در زیر درختان وجود دارد، دریافت کنیم، این پارامتر باید حداکثر روی مقدار 1200 تنظیم شود.
سرعت پرواز
سرعت پرواز عامل دیگری در کنترل تراکم و توان تفکیک ابر نقاط است، اما این پارامتر بیشترین تأثیر را در مدت زمان پرواز دارد. به عنوان مثال، زمان پرواز روی یک بلوک 500 در 500 متر نیز ارائه شده است. هنگامی که حداقل عمر باتری xx% روی هواپیمای بدون سرنشین باقی بماند، باید پهپاد را در نظر بگیرید. برای تراکم بالا و توان تفکیک بالا، در حالت ایده آل، سرعت پرواز باید کمتر از 5 متر بر ثانیه باشد.
پس از اتمام برنامه ریزی پرواز، اطلاعات می توانند در نرم افزار برنامه ریزی پرواز هواپیمای بدون سر نشین بارگذاری شوند. ما UgCS را می پسندیم زیرا یک خرید یک مرحله ای برای برنامه ریزی و اجرای مأموریت فراهم می کند. نسبتا ارزان، سریع، بسیار توانا و قابل اعتماد است. یکی از مهم ترین ویژگی های هر ابزار برنامه ریزی مأموریت، امکان نگهداری خودکار ارتفاع معین از سطح زمین در هنگام پرواز است. این امر به ویژه برای اسکن کردن لیدار از اهمیت زیادی برخوردار است زیرا تراکم نقطه، دقت و پوشش آن به داشتن توانایی پیروی از زمین در ارتفاع انتخابی وابسته است. بسیاری از برنامه ریزان مأموریت ارتفاعات مختلف ایستگاه را از نرم افزار برنامه ریزی مأموریت به نرم افزار اتوماتیک خلبان و بدون دستکاری بیش از حد صادر نمی کنند.
پیوست
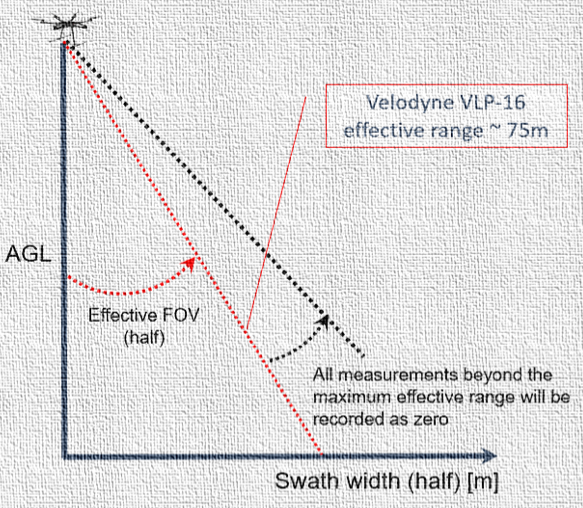
در این ضمیمه، ما در متن خود سه محدوده را واضح می کنیم: دامنه اسمی، محدوده موثر (یا محدوده عملیاتی)، و دامنه شیب. دامنه اسمی اسکنرهای لیزری Velodyne به 100 متر یا 200 متر معروف است. با این حال، باید توجه داشت که این دامنه نشان دهنده حداکثر دامنه ای است که می توان هنگام پرتوهای لیزر آن ها به مواد بازتابی یا بازتابی بالا، با بازتابش 100% ای، را توسط این لیزر اسکنرها حس کرد. این دامنه ممکن است برای برنامه های کاربردی مانند رانندگی اتوماتیک باشد که در آن لیزر اسکنر برای احساس کردن و جلوگیری از وسیله نقلیه جهت برخورد با اهداف مختلف را در حداکثر فاصله حس کند، اما این محدوده قابل استفاده برای پروژه های مختلف نقشه برداری نیست. به طور کلی، در نقشه برداری پهپاد مبتنی بر پهپادها، لیزر اسکنرها مواد را با بازتابش کمتر از 5% بازتاب می دهند. به همین خاطر معمولا دامنه موثر این اسکنرها به ترتیب 75 و 175 متر در نظر گرفته می شود. هنگام پرواز در ارتفاع محدوده موثر، اسکنر پس از اتمام اندازه گیری یک پروفیل از سطح زمین ایجاد می کند. این به این دلیل است که با پرواز در این ارتفاع، لیزر اسکنر در زاویه دید صفر کار می کند. هر پرتویی فراتر از این محدوده موثر به عنوان یک محدوده صفر اندازه گیری خواهد شد (می خواهید داده های GB-Zero لیدار را داشته باشید). به عبارت دیگر، دامنه لیزر اسکنر زاویه دید لیزر اسکنر را تعیین می کند (نه برعکس).
این واقعیت در شکل 2 به وضوح نشان داده شده است، که در آن دامنه موثر لیزر اسکنر حداکثر دامنه شیب را که می تواند توسط لیزر اسکنر اندازه گیری کند نشان می دهد. برای مثال، اگر کاربر FOV را روی 180 درجه تنظیم کند (از شرق به غرب (ساعتگرد))، نمی تواند اندازه گیری دامنه ای را فراتر از FOV موثر ثبت و اندازه گیری کند. به همین دلیل است که در مأموریت پرواز ما، تنظیمات FOV یک مقدار خروجی است که بر اساس محدوده موثر لیزر اسکنر خاص و ارتفاع پرواز برآورد می شود.
منبع: www.geodetics.com
مطالب مرتبط:
۱. چگونگی افزایش تراکم نقطه ای سیستم لیدار شما
۲. پسا پردازش کینماتیک GPS برای سیستم های پهپاد لیدار
۳. افزایش کارایی فتوگرامتری پهپاد



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}