
تهیه ابرنقاط توسط اسکنرهای لیزری در مقایسه با فتوگرامتری سیستمهای تصویر برداری هوایی بدون سرنشین (UAS)
آیا ابرنقاط تهیه شده توسط روشهای فتوگرامتری نسب به ابرنقاط لیدار برتری دارند؟ برای بررسی این موضوع مورد بحث، نویسنده از لیزر اسکنر زمینی و یک سیستم هوایی بدون سرنشین جهت نقشه برداری یک گودال ماسه ای استفاده کرده است.
بررسیها نشان میدهد زمانیکه بالاترین میزان جزئیات مدنظر باشد لیزر اسکنر زمینی (TLS) برتری دارد. درحالیکه برای پروژه های نقشه برداری بزرگتر، روش فتوگرامتری با پرنده بدون سرنشین (UAS) یک سطح مناسبی از جزئیات و دقت را فراهم می کند و امنیت نقشه بردار را نیز بهبود می دهد.
در نقشه برداری مدرن انواع روشهای اندازه گیری میتواند در دو دسته کلی قرار گیرد: ۱) روش های نقشه برداری سر زمین با بکارگیری گیرنده GNSS و توتال استیشن یا ترازیاب. ۲) روش های برداشت از دور با استفاده از اسکنرهای لیزری ( لیدار) یا روش های فتوگرامتری.
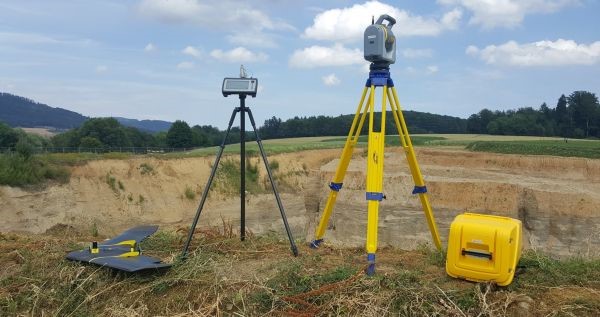
لیزر اسکنر زمینی و روش فتوگرامتری با پرنده بدون سرنشین برای انواع پروژه ها مورد استقبال قرار گرفته اند. دقت، تراکم نقاط، مدت زمان اخذ داده، هزینه و زمان اجرای پروژه مهمترین معیارها جهت ارزیابی عملکرد هستند. با مقایسه ی عملکرد لیزر اسکنر زمینی و فتوگرامتری پرنده بدون سرنشین، در تنها یک پروژه نمیتوان پاسخ قطعی برای این مسئله یافت، زیرا انتخاب یکی از این دو روش به نیازهای کارفرما و شرایط پروژه بستگی دارد. بنابراین مقایسه بین لیزر اسکنر زمینی و روش فتوگرامتری با پرنده بدون سرنشین (شکل۱)، میتواند نقاط ضعف و قوت هریک از این روش ها را نشان دهد، که هدف این پژوهش می باشد.
جزئیات محوطه مورد بررسی
یک گودال ماسه ای به مساحت ۴ هکتار در منطقه Olten شمال غربی سوئیس به عنوان محوطه انتخاب شده است(شکل۲). برای چنین محوطه هایی، ابرنقطه متراکم کاربران را قادر به محاسبه شیب و حجم، شناسایی دره و قله و تولید منحنی میزان، میسازد. گودال ماسه ای با عمق تقریبا ۴۰ متر، به دلیل وجود نواحی پنهان، چالشی برای فتوگرامتری پرنده بدون سرنشین ایجاد کرده است که موجب کاهش دقت میگردد. برای ژئورفرنس کردن ایستگاه لیزر اسکنر زمینی و ارزیابی دقت پرنده بدون سرنشین، ۹ نقطه کنترل زمینی ایجاد شده و مختصات آنها توسط گیرنده Trimble R10 GNSS تعیین گردیده است(شکل۳).
تهیه ابرنقاط توسط اسکنرهای لیزری در مقایسه با فتوگرامتری سیستمهای تصویر برداری هوایی بدون سرنشین (UAS)
آیا ابرنقاط تهیه شده توسط روش های فتوگرامتری نسب به ابرنقاط لیدار برتری دارند؟ برای بررسی این موضوع مورد بحث، نویسنده از لیزر اسکنر زمینی و یک سیستم هوایی بدون سرنشین جهت نقشه برداری یک گودال ماسه ای استفاده کرده است.
بررسی ها نشان میدهد زمانیکه بالاترین میزان جزئیات مدنظر باشد لیزر اسکنر زمینی (TLS) برتری دارد. درحالیکه برای پروژه های نقشه برداری بزرگتر، روش فتوگرامتری با پرنده بدون سرنشین (UAS) یک سطح مناسبی از جزئیات و دقت را فراهم میکند و امنیت نقشه بردار را نیز بهبود می دهد.
در نقشه برداری مدرن انواع روش های اندازه گیری میتواند در دو دسته کلی قرار گیرد: ۱) روشهای نقشه برداری سر زمین با بکارگیری گیرنده GNSS و توتال استیشن یا ترازیاب. ۲) روش های برداشت از دور با استفاده از اسکنرهای لیزری ( لیدار) یا روش های فتوگرامتری.
لیزر اسکنر زمینی و روش فتوگرامتری با پرنده بدون سرنشین برای انواع پروژه ها مورد استقبال قرار گرفته اند. دقت، تراکم نقاط، مدت زمان اخذ داده، هزینه و زمان اجرای پروژه مهمترین معیارها جهت ارزیابی عملکرد هستند. با مقایسه ی عملکرد لیزر اسکنر زمینی و فتوگرامتری پرنده بدون سرنشین، در تنها یک پروژه نمیتوان پاسخ قطعی برای این مسئله یافت، زیرا انتخاب یکی از این دو روش به نیازهای کارفرما و شرایط پروژه بستگی دارد. بنابراین مقایسه بین لیزر اسکنر زمینی و روش فتوگرامتری با پرنده بدون سرنشین (شکل۱)، میتواند نقاط ضعف و قوت هریک از این روش ها را نشان دهد، که هدف این پژوهش می باشد.
جزئیات محوطه مورد بررسی
یک گودال ماسه ای به مساحت ۴ هکتار در منطقه Olten شمال غربی سوئیس به عنوان محوطه انتخاب شده است(شکل۲). برای چنین محوطه هایی، ابرنقطه متراکم کاربران را قادر به محاسبه شیب و حجم، شناسایی دره و قله و تولید منحنی میزان، میسازد. گودال ماسه ای با عمق تقریبا ۴۰ متر، به دلیل وجود نواحی پنهان، چالشی برای فتوگرامتری پرنده بدون سرنشین ایجاد کرده است که موجب کاهش دقت میگردد. برای ژئورفرنس کردن ایستگاه لیزر اسکنر زمینی و ارزیابی دقت پرنده بدون سرنشین، ۹ نقطه کنترل زمینی ایجاد شده و مختصات آنها توسط گیرنده Trimble R10 GNSS تعیین گردیده است(شکل۳).
نقشه برداری لیزر اسکنر زمینی(TLS)
اسکنر Trimble SX10برای نقشه برداری لیزر اسکنر زمینی استفاده شده است. آماده سازی برای فرآیند نقشه برداری شامل تعیین توزیع بهینه برای نقاط کنترل و ایستگاه های لیزر اسکنر زمینی می باشد. هر ایستگاه لیزر اسکنر زمینی نیاز دارد به حداقل سه نقطه کنترل زمینی دید داشته باشد. جهت پوشش کل محوطه، سه ایستگاه برای لیزر اسکنر زمینی بیرون گودال و دو ایستگاه در بالای گودال قرار گرفتهاند. برای توجیه و تنظیم موقعیت قرارگیری لیزر اسکنر زمینی دستگاههای ترازیابی مورد نیاز است. روش “free station” جهت تعیین مختصات سه بعدی ایستگاه های با موقعیت نامعلوم با درنظر گرفتن نقاط کنترل زمینی قابل مشاهده، بکار گرفته شده است. به طور میانگین نقشه برداری لیزر اسکنر زمینی در هرایستگاه ۴۵ دقیقه و بررسی کل محوطه تقریبا ۴ ساعت به طول می انجامد.
نقشه برداری با سیستم هوایی بدون سرنشین(UAS)
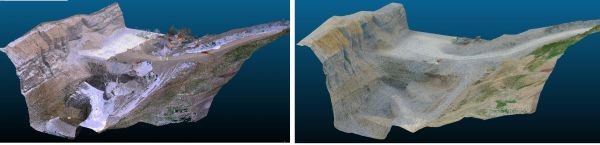
نقشه برداری با سیستم هوایی بدون سرنشین توسط senseFly eBee Plus RTK/PPK انجام گردیده است. در ابتدا مسیر و مرزهای پروازی توسط eMotion 3، طراحی مسیر پرواز eBee و نرم افزار مدیریت تعیین می شود. این نرم افزارهای حرفه ای برای طراحی کلی محوطه، مشخص کردن ناحیه پرواز و طراحی مسیر پرواز به صورت خودکار بکارگرفته می شوند. برای ارزیابی تاثیر فاصله نمونه برداری زمینی (GSD) در کیفیت ابرنقطه و تعیین مسیر بهینه سیستم هوایی بدون سرنشین، پرواز در دو ارتفاع انجام گردیده است: ۱۰۰متری و ۱۵۰ متری. از قابلیت eBee’s RTK برای دریافت تصحیحات RTK و بالا بردن صحت استفاده شده است. همچنین پرواز در دو ارتفاع موجب ایجاد چهار ابرنقطه حاصل از سیستم هوایی بدون سرنشین می شود. PC1 (ابرنقطه اول) در ارتفاع ۱۰۰ متری و PC2 (ابرنقطه دوم) در ارتفاع ۱۵۰ متری اتخاذ شده است، PC3 (ابرنقطه سوم) از ادغام PC1 و PC2 حاصل میشود. PC1 و PC2 توسط نقاط کنترل زمینی ژئورفرنس شده اند. PC4 (ابرنقطه چهارم) در ارتفاع پرواز ۱۰۰ متر در نظر گرفته شده است و توسط تصحیحات RTK ژئورفرنس شده است. چمنزار کنار گودال ماسهای به عنوان باند پرتاب و فرود پرنده انتخاب شده است. مدل رقومی سطح (DSM) و اورتوموزاییک، توسط نرم افزار Agisoft PhotoScan تولید گردیده است. شکل ۴ یک مدل رقومی سطح، حاصل از لیزر اسکنر زمینی و سیستم هوایی بدون سرنشین را نشان میدهد.

معیارهای ارزیابی
معیارهای ارزیابی شامل مدت زمان جمع آوری داده سر زمین، مدت زمان آماده سازی دفتری، مدت زمان پردازش داده و هزینه ها می باشد. با پرواز پرنده بدون سرنشین در دو ارتفاع مختلف و نقاط کنترل زمینی ایجاد شده در محوطه، ابرنقاط حاصل از سیستم هوایی بدون سرنشین میتوانند از نظر دقت مطلق و تراکم داده مقایسه شوند. علاوه براین، بررسی شده که آیا پرواز RTK به تنهایی بدون در نظر گرفتن نقاط کنترل زمینی می تواند به سطح دقت نقاط کنترل زمینی دست یابد. معیار دیگر ارزیابی شامل، تاثیر ضریب ارتفاع پرواز/ GSD در کیفیت ابرنقطه و تاثیر تعداد تصاویر مورد استفاده در فرآیند (ارتفاع پرواز بالاتر، تعداد عکسهای کمتر) روی تراکم نقاط، است.

نتایج ابرنقاط ژئورفرنس شده ی لیزر اسکنر زمینی و چهار ابرنقطه ی سیستم هوایی بدون سرنشین در نرم افزار CloudCompare و Autodesk CAD Civil 3D تحلیل شده اند. نتایج در جدول ۱ لیست شده است. دقت ابرنقاط حاصل از سیستم هوایی بدون سرنشین در حد چند سانتی متر است در حالیکه دقت ابرنقاط لیزر اسکنر زمینی دقتی در حدود چند میلی متر دارند. علاوه براین لیزر اسکنر ابرنقاط متراکمتری نسبت به سیستم هوایی بدون سرنشین تولید می کند. در نتیجه ابرنقاط لیزر اسکنر به عنوان مبنای مقایسه ی ابرنقاط حاصل از از سیستم هوایی بدون سرنشین بکارگرفته شده اند. توسط CloudCompare میتوان انحراف از قائم و انحراف معیار استاندارد بین دو ابرنقطه را ارزیابی کرد. AutoCAD برای تکمیل مقایسه ی حجم با استفاده از همان سطح پایه برای تمام ابرنقاط بکار گرفته شده است. حجم خاک برداری و خاک ریزی با این سطح مقایسه گردیده است.
| PC4 | PC3 | PC2 | PC1 | |
| ۱۵۰ | ۱۰۰ | ۱۵۰ | ۱۰۰ | ارتفاع پرواز (متر) |
| ۹٫۵ | ۹٫۴ | ۶٫۴ | ۵٫۵ | انحراف قائم (سانتی متر) |
| ۵٫۸ | ۵٫۹ | ۵٫۹ | ۵٫۲ | انحراف معیار استاندارد (سانتی متر) |
| ۱٫۰۷۸- | ۶۱۹ | ۲٫۰۴۱- | ۴٫۱۹۸- | اختلاف حجم (مترمکعب) |
| ۰٫۰۳- | ۰٫۰۲ | ۰٫۰۶- | ۰٫۱۲- | اختلاف حجم/سطح (سانتی متر) |
جدول۱. عملکرد چهار ابر نقطه حاصل از عنوان مبنای مقایسه سیستم هوایی بدون سرنشین با بکارگیری ابرنقطه حاصل از لیزر اسکنر زمینی
ابرنقاط حاصل از سیستم هوایی بدون سرنشین که توسط نقاط کنترل زمینی و تنها توسط RTK ژئورفرنس شده اند، هر دو انحراف قائم کمتر و انحراف معیار استاندارد مشابه نسبت به ابرنقاط مرجع لیزر اسکنر زمینی دارند. این نتیجه نشانگر آن است که در سیستم هوایی بدون سرنشین بمنظور اطمینان از دست یافتن به دقت مطلق بالا، نیازی به استفاده از نقاط کنترل زمینی نیست (جدول۲).ابرنقاط لیزر اسکنر زمینی نسبت به ابرنقاط سیستم هوایی بدون سرنشین تراکم نقاط بسیار بالایی دارند، بنابراین شامل جزئیات لازم برای اغلب کاربردهای نقشه برداری میباشند. نویز ابرنقاط سیستم هوایی بدون سرنشین ارزیابی نشده است، اما در مقایسه با ابرنقاط لیزر اسکنر زمینی انحراف معیار استاندارد یکسان و انحراف از قائم کمتری دارد؛ بنابراین نشان میدهد که نویزها در لیزر اسکنر زمینی و سیستم هوایی بدون سرنشین غیر مرتبط اند. ابرنقاط به خوبی ایجاد شدهاند؛ مدل رقومی سطح، حجم ها و سایر محصولات تولید شده، تحت تاثیر نویز قرار نگرفته اند.
| سیستم هوایی بدون سرنشین (۱۵۰متر) | سیستم هوایی بدون سرنشین (۱۰۰متر) | لیزر اسکنر زمینی | |
| ۶۴۵٫۶۹۵ | ۱,۲۴۶,۹۵۱ | ۲۴,۴۱۶,۵۹۴ | تعداد نقاط |
| ۱۹ | ۳۷ | ۷۴۱ | تعداد نقاط/ مترمربع |
| ۲۰ | ۲۰ | ۲۲۵ | زمان (کمینه) |
| ۲۶۰۰۰ | ۷۰۰۰۰ | هزینه (یورو) |
جدول۲. مقایسه معیارها. معیار زمان شامل مدت زمان لازم سر زمین جهت اخذ داده و زمان پردازش دفتری است.
مترجم: سحر کمال لو
مطالب مرتبط:
۱. به وسیله یک دوربین و پرنده بدون سرنشین، بازسازی یک معدن را نظارت کنید.
۲. چرا از فتوگرامتری برای نقشه برداری و تهیه نقشه استفاده میشود؟
۳. پر کردن فضاهای خالی بین تصاویر هوایی و داده های زمینی اخذ شده





{kind=link}