
آیا تا به حال نتایج به دست آمده از پهپادهای RTK/PPK و نتایج استفاده از نقاط کنترل زمینی را با هم مقایسه کرده اید؟ به نظر شما نتایج یکسانی دارند یا یکی نسبت به دیگری دقت بهتری دارد؟
نویسنده: Lisa Chen
پهپادهای RTK/PPK کارشان چیست و چه ویژگی خاصی دارند؟
وقتی یک پهپاد غیر آر تی کی non-RTK را که مجهز به گیرنده GPS است و یا گیرنده همراه دوربین است را به پرواز در می آورید، موقعیت های دوربین از محل تقاطع طول ها به دست می آید؛ و این یعنی موقعیت دوربین با اندازه گیری چند فاصله تعیین می گردد. بسته به کیفیت تجهیزات و هندسه ماهواره، معمولاً این نوع تعیین موقعیت با دقتی در حد چندین متر صورت می گیرد، به خصوص در مؤلفه Z که این مقدار خطا بیشتر است.

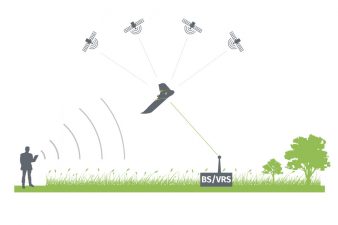
با برقراری یک ارتباط به منظور انتقال داده مانند GSM یا Wi-Fi، پهپاد RTK به یک ایستگاه بیس Base یا ایستگاه مرجع مجازی (VRS) از طریق لپتاپی که پرواز را کنترل می کند، متصل می شود. موقعیت های دوربین به صورت آنی (لحظه ای یا Real-Time) نسبت به این نقاط زمینی – که موقعیتشان در یک بازه زمانی طولانی و به دقت اندازه گیری شده – محاسبه می شود. این محاسبات به اصلاح موقعیت های دوربین با سطح دقت ۲ تا ۳ سانتی متر در مؤلفه های مسطحاتی و ارتفاعی کمک می کند.
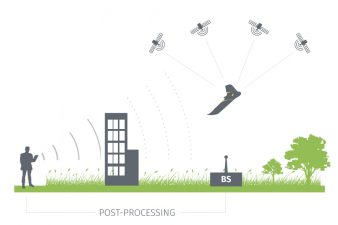
با این حال همه چیز آن طور که ما می خواهیم پیش نمی رود. کسانی که اغلب در سایت های عمرانی (خارج از شهر) کار می کنند معمولاً با قطع ارتباط مواجه هستند که این امر ارسال تصحیحات موقعیت دوربین را با اختلال همراه می سازد. در چنین شرایطی سیستم مقادیر ناپایدار یا float را ثبت می کند و یا به وضعیت مستقل (مطلق) بر می گردد. موقعیت های دوربین RTK-Float هستند و این یعنی خطاهای بزرگی در تصحیحات وجود دارد. دقت مجدد پایین می آید و به چند ده سانتی متر در حالت RTK-float می رسد. در چنین شرایطی می توانید بعد از انجام پرواز محاسباتی را نسبت به ایستگاه مرجع زمینی انجام دهید که به این روش کینماتیک پس پردازش شده یا PPK گفته می شود.
با داشتن پهپادهای RTK/PPK به نقطه کنترل زمینی نیاز نیست، اما اگر نقاط کنترل زمینی (GCPs) در دسترس باشد، چه شرایطی پش می آید؟ آیا استفاده از پهپادهای RTK/PPK نتایج بهتری نسبت به استفاده از GCP ها ارائه می کنند؟
کدامیک دقت بهتری دارند؟ PPK ، RTK ، یا GCPs؟
باید قبول کنیم که داشتن پهپادی با قابلیت RTK/PPK نسبت به پهپادهای غیر RTK زمانی که به علت محدودیت های پروژه یا خستگی کار زمینی، قصد ندارید از نقطه کنترل زمینی استفاده کنید یک مزیت به حساب می آید. هرجند پهپاد RTK/PPK نیازمند تجهیزات سخت افزای و نرم افزاری ویژه ای است. کل سیستم به برقراری ارتباط با ایستگاه های بیس یا VRS نیاز دارد تا قابلیت های پس پردازش را نیز شامل شود. داشتن نرم افزاری قوی برای پردازش تصاویر مانند Pix4Dmapper که برای هر موقعیت دوربین دقت مؤلفه های موقعیت را در نظر می گیرد ضروری است.
داشتن همه این تجهیزات hi-tech، پهپادهای RTK/PPK را نسبت به سایر پهپادها گران قیمت تر کرده است. در ادامه مقایسه ای کیفی بین پروازهای RTK/PPK بدون نقطه کنترل زمینی و پرواز های غیر RTK با نقاط کنترل زمینی با توزیع مناسب در منطقه را انجام می دهیم. این مقاله می تواند پیش نیاز یا مرجعی باشد برای کسانی که قصد خرید پهپاد جدید با قابلیت RTK/PPK را دارند.
برای بررسی بهتر عملکرد سیستم، دو پرواز جدا انجام گرفته است: یکی در حالت RTK و دیگری در حالت مطلق (تصحیحات آنی غیرفعال باشد یا ارتباط در حین پرواز قطع شود) بر فراز دو منطقه متفاوت: زمین های زراعی و مناطق شهری
پروازها با پهپاد ایبی پلاس سنسفلای senseFly eBee Plus انجام شده و نقاط کنترل زمینی با گیرنده Javad Triumph-ls برداشت شده اند. هر دو پرواز RTK و معمول یک منطقه شرایط یکسانی داشتند. از GCPs برای تعدیل موقعیت های دوربین در حالت پرواز معمول استفاده شد و تعدادی نقطه چک برای ارزیابی دقت کار در هر دو حالت به کار برده شد. پروژه ها با نرم افزار Pix4Dmapper و با تنظیمات پیش فرض تهیه نقشه ۳D پردازش شد.
پرواز بر فراز زمین های زراعی
رن پروازی معمولی، ارتفاع = ۱۰۲ متر (GSD 2.5 cm)، پوشش طولی ۸۰%
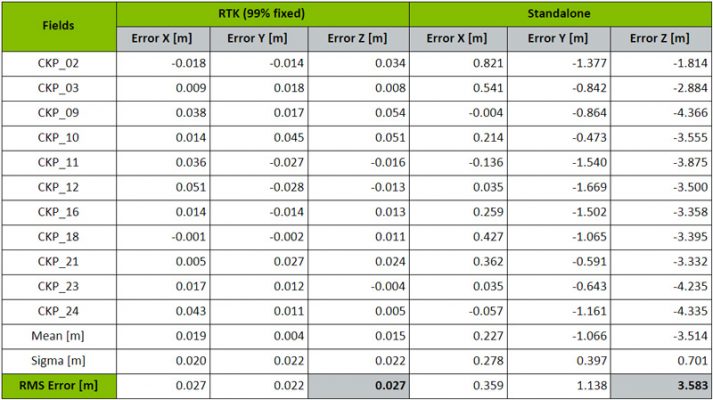
 هنگام پرواز بر فراز زمین های زراعی، ارتباط به خوبی برقرار است چرا که موانع یا عوارض مسدود کننده ارتباط در منطقه وجود ندارد. پرواز RTK در این حالت ۹۹% موقعیت دوربین را کاملاً fixed می دهد که دیگر به پس پردازش کینماتیک (PPK) نیازی نیست.
هنگام پرواز بر فراز زمین های زراعی، ارتباط به خوبی برقرار است چرا که موانع یا عوارض مسدود کننده ارتباط در منطقه وجود ندارد. پرواز RTK در این حالت ۹۹% موقعیت دوربین را کاملاً fixed می دهد که دیگر به پس پردازش کینماتیک (PPK) نیازی نیست.
در این جا دقت پرواز RTK بدون استفاده از نقاط کنترل زمینی و پرواز مستقل با نقاط کنترل زمینی با توزیع مناسب را با هم مقایسه می کنیم. نتایج پرواز RTK در پرواز زراعی کاملاً چشم گیر است. در تمام مؤلفه ها (X,Y,Z) دقت حدود ۱ پیکسل (۲٫۵ سانتی متر) می دهد. در حالت مستقل به دقت ارتفاعی ۳٫۶ متر می رسیم که بدون استفاده از تصحیحات یا نقاط کنترل زمینی قابل پیش بینی بود.
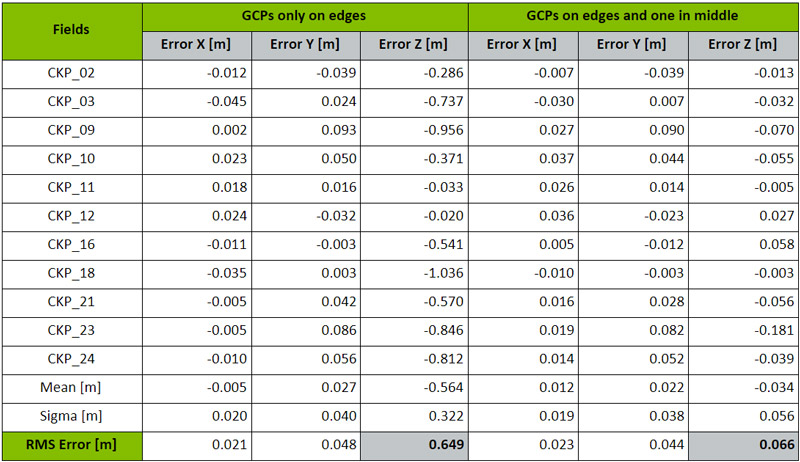
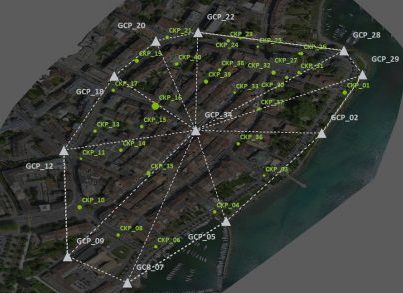
به محض استفاده از نقاط کنترل زمینی، خطای Z به سرعت کاهش پیدا کرد. این نکته را پی بردیم که توزیع نقاط کنترل نقش به سزایی در این نوع پروژه ها ایفا می کند. در این جا به کار گیری نقاط کنترل در موقعیت های مختلف را مقایسه کردیم:
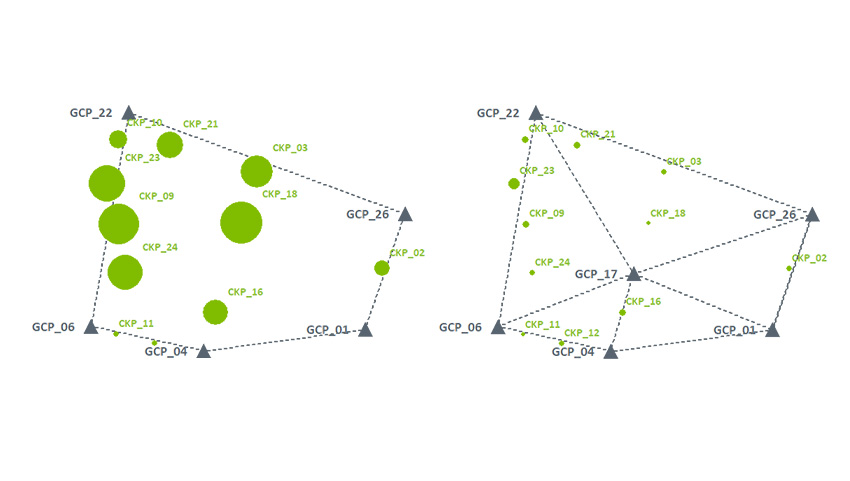
با نگاه به جدول می بینیم که با قرار دادن ۱ نقطه کنترل بیشتر در وسط منطقه، دقت ارتفاعی از ۶۵ سانتی متر به حدود ۶٫۶ سانتی متر رسید، هر چه از نقاط کنترل دور می شویم، خطا تجمعی می شود، همچنین اطراف مناطقی که نواحی سخت هستند خطا خواهیم داشت. “یک ناحیه سخت” در اینجا به مواردی اشاره دارد که برای یافتن عوارض تناظریابی تصویری می تواند مشکل ساز شود و زمین زراعی یکی از این موارد است. تصاویر تهیه شده از چنین ناحیه هایی خطاهای موقعیت بیشتری ایجاد می کنند که منجر به کاهش دقت می شود. در این شرایط، موقعیت دقیق دوربین (۹۹% RTK-fixed در مرحله اول) مانند نقاط کنترل با تراکم و توزیع مناسب عمل می کنند.
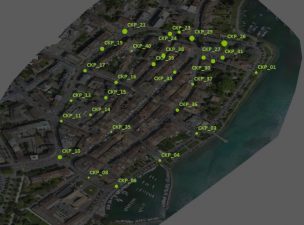
پرواز بر فراز مناطق شهری
رن پروازی شبکه متعامد و مضاعف، ارتفاع = ۱۰۲ متر (GSD 2.5 cm)، پوشش طولی ۸۰%
پرواز با یک پهپاد بال ثابت بر فراز منطقه شهری می تواند پیچیده تر باشد. جدا از مسائل مربوط به مجوزها، شما به مکانی باز برای تیک آف و فرود نیاز خواهید داشت که این امر همیشه برای مناطق شهری امکان پذیر نیست.
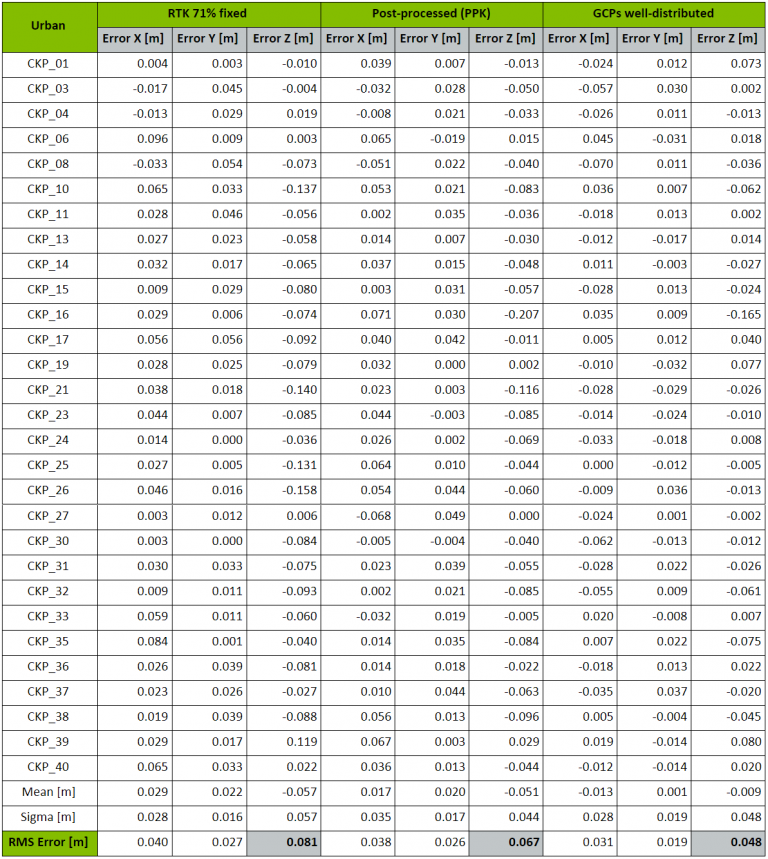
 در این پروژه نزدیک به مرکز شهر یک پارک ورزشی بزرگ را یافتیم. ساختمان ها، درختان و آنتن های وای فای محلی در ارتباط ایستگاه زمینی با پرنده در حال پرواز تداخل ایجاد کردند. همین امر باعث شد که تنها ۷۱% از موقعیت های دوربین به صورت کامل تصحیح شوند (به عبارت دیگر RTK وضعیت fixed داشته باشد).
در این پروژه نزدیک به مرکز شهر یک پارک ورزشی بزرگ را یافتیم. ساختمان ها، درختان و آنتن های وای فای محلی در ارتباط ایستگاه زمینی با پرنده در حال پرواز تداخل ایجاد کردند. همین امر باعث شد که تنها ۷۱% از موقعیت های دوربین به صورت کامل تصحیح شوند (به عبارت دیگر RTK وضعیت fixed داشته باشد).
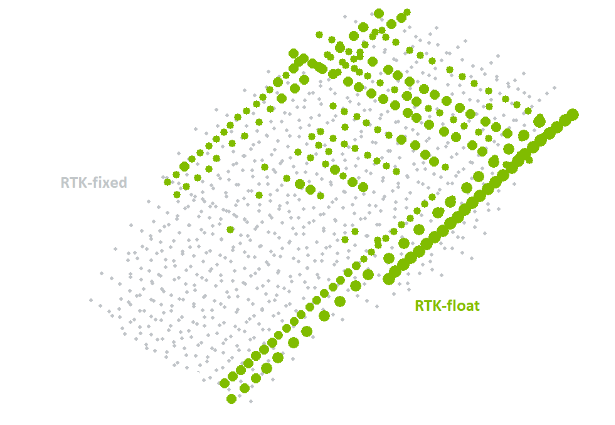
شرایطی مانند توزیع غیر یکنواخت موقعیت های ناپایدار RTK-float که در واقع موقعیت ایستگاه عکسبرداری تصحیح نشده است مانع از بهبود دقت کلی (گلوبال) می شود. از نتایج متوجه شدیم که عیب پروازهای RTK زمانی است که به دلیل وجود موانع ارتباط از دست می رود. در چنین شرایطی PPK نتایج را بهبود می بخشد. البته نمی توان تضمین کرد که این روش همواره بهتر از به کارگیری نقاط کنترل زمینی است، در این مورد آزمایش شده نتایج به هم نزدیک بود.
در پرواز RTK خطاهای بزرگتری در نزدیکی جاهایی که موقعیت دوربین RTK-float شده است دیده می شود، در حالیکه در نتایج پس پردازش، خطا در کل ناحیه یکنواخت تر شد.
نتیجه گیری
برای زمین های زراعی یا سایر مکان ها، هموار یا دارای پستی و بلندی های شدید، زمانی که ارتباط رادیویی برقرار است و مانعی وجود ندارد، پرواز RTK ، توپوگرافی سطح زمین را به خوبی ایجاد می کند و نتایج به شدت دقیقی را بدون استفاده از GCP به ما می دهد.
نقشه برداری با پهپاد RTK/PPK زمانی که پوششِ گیاهیِ متراکم و زمین زراعی داریم یا در محتوای تصاویر عوارضی داریم که تناظریابی آن ها مشکل است بسیار سودمند است. صرف نظر از اینکه در منطقه نقطه کنترل زمینی در نظر گرفته اید و یا قادر به ایجاد نقطه کنترل در منطقه هستید یا نه، در پرواز RTK/PPK همواره دقت بالا و خروجی های با کیفیت و قابل کنترل خواهید داشت.


در مناطق شهری، شرایط به کلی متفاوت است. در قسمت هایی که ارتباط از دست می رود با توزیع غیر یکنواخت موقعیت های RTK-float برای ایستگاه عکسبرداری مواجه هستیم که این موضوع بهبود دقت کلی را مشکل می سازد. در بررسی موردی ما، PPK نتایج بهتری نسبت به پرواز RTK داشت، هر چند PPK دقت بهتری نسبت به زمانی که پروژه به کمک نقاط کنترل زمینی با توزیع مناسب در منطقه پردازش می شود فراهم نمی کند.
تا به این جا کیفیت نهایی هر دو روش را دیدیم، هرچند مواردی وجود دارد که همواره باید آن را به خاطر داشته باشیم:
امکان سنجی، زمان، هزینه و محل استقرار شما
به سبب شرایطی که سایت برداشت دارد، مانند زمین هایی با بافت سست، نقاط غیر قابل دسترس و نگرانی های مربوط به ایمنی پرسنل، همیشه امکان اندازه گیری نقاط کنترل زمینی وجود ندارد. همچنین طراحی و اندازه گیری نقاط کنترل زمینی هر بار ساعت ها زمان می برد، اما پس پردازش به طور متوسط ۱۰ تا ۲۰ دقیقه زمان نیاز دارد. از نقطه نظر مالی، شما یک بار برای داشتن پهپاد RTK/PPK پول پرداخت می کنید ولی برداشت نقاط کنترل زمینی در هر پروژه برای شما هزینه در بر خواهد داشت. بلند مدت فکر کنید، تهیه پهپاد RTK/PPK از نظر اقتصادی توجیه دارد.
برای تهیه پهپاد RTK/PPK آماده اید؟ اگر از راهکار RTK/PPK استفاده می کنید حتما از دسترسی به ایستگاه بیس محلی یا شبکه های VRS در منطقه برداشت مطمئن شوید. در غیر این صورت نیاز دارید که ایستگاه بیس base خود را ایجاد کنید.
مطالب مرتبط:
۱. بکارگیری پهپاد فتوگرامتری برای نقشه برداری از کوهستان ها
۲. rayCloud قدرت درک فتوگرامتری
۳.فتوگرامتری به پهپادهای تجاری می پیوندد.





{kind=link}