مبانی فتوگرامتری در جابجایی سنجی
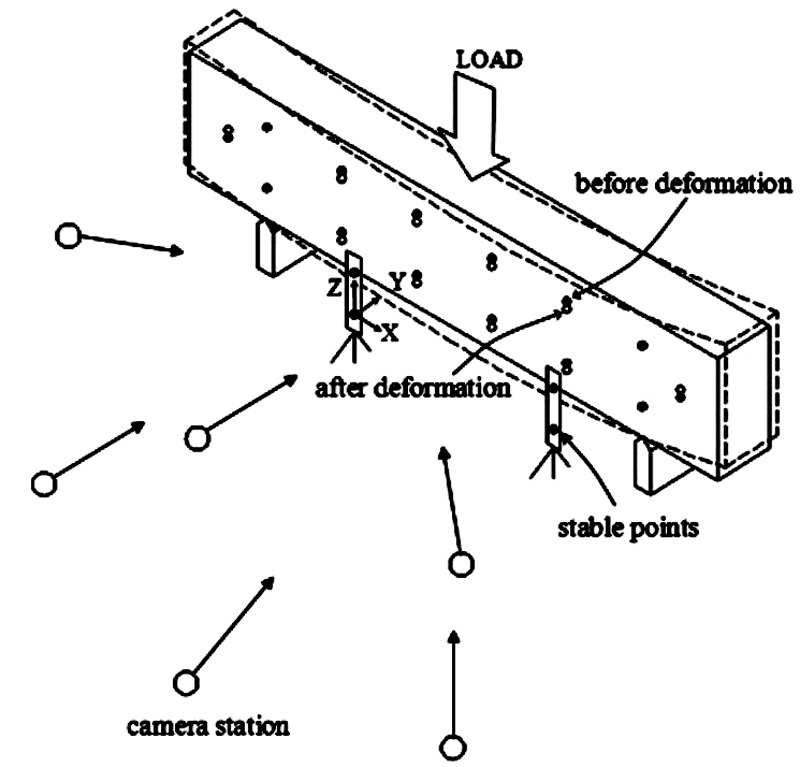
به طور کلی در هر پروژه جابجایی سنجی با جسمی مواجه می باشیم که در دو زمان مجزا در اثر عوامل مختلف، تغییر شکل نسبی و یا تغییرشکل مطلق در آن اتفاق می افتد. اغلب آنچه به عنوان جابجایی سنجی برای این جسم مطرح است، تعیین میزان این جابجایی ها در هر سه بعد XYZ برای نقاطی به عنوان نماینده از این عارضه به صورت مطلق نسبت به عوارض ثابت دیگر است. شکل زیر یک مورد فرضی برای مطالعه تغییر شکل سازه ای یک شکل دلخواه توسط ابزار فتوگرامتری را نشان می دهد. در این مورد، شیء ابتدا در حالت بدون بازگذاری توسط یک شبکه شامل شش عکس همپوشانی عکسبرداری شده است. این اندازه گیری ها، مختصات (X,Y,Z) نقاط سطح و نقاط کنترل خارج از سطح آبجکت را تولید می کنند. بازگذاری روی شیء باعث می شود تا شیء به یک حالت جدید تغییر شکل دهد. مختصات نقاط جابجا شده روی سطح مجددا اندازه گیری می شوند. در گام اول تغییر شکل نسبی شیء مورد نظر بوسیله رابطه هندسی بین مختصات کارتزین نقاط مانیتورینگ در دو اندازه گیری فتوگرامتری مشخص می شود.

هندسه شبکه برای اندازه گیری جابه جایی
وقتی دو شبکه اندازه گیری به یک سیستم مختصات مرجع مشترک (با استفاده از انتقالی که در آن شکل ثابت می ماند و با چهار نقطه ثابت قابل حل است) برده می شوند، جابجایی های نسبی و مطلق هر دو می توانند تعیین شوند. در تحلیل های مربوط به تغییر شکل سازه ای، از داده های جابجایی نقاط به عنوان اطلاعات اندازه گیری پایه استفاده می شود که از این اطلاعات ابتدا پارامترهای تابع جابجایی و نهایتا مدل تغییر شکل تعیین می شوند. برای پذیرفتن این فرض که جابجایی های اندازه گیری شده نقاط از نظر آماری نتیجه بارز تغییر شکل است و نه در اثر خطاهای سیستماتیک یا تصادفی اندازه گیری فتوگرامتری، باید مختصات نقاط مانیتورینگ برای هر اپک تا یک سطح قابل قبول از دقت و اطمینان تعیین گردند. این موضوع به این معناست که شخص استفاده کننده از روش فتوگرامتری برد کوتاه باید قادر به تعیین دقت و صحت اندازه گیری های محتمل در مرحله طراحی پروژه باشد.
اما ساختار و مراحل پیاده سازی چنین مشاهدات و اندازه گیری هایی به روش فتوگرامتری را می توان این طور بیان کرد؛ به طور کلی ابتدا شرایط پروژه از دیدگاه پیاده سازی سیستم فتوگرامتری بررسی می گردد. سپس ساختار فنی سیستم فتوگرامتری در قالب طراحی ساختار و ابعاد تارگت ها با توجه به شرایط پروژه تعیین و اندازه گیری نقاط کنترل و یا طول میله های مقیاس، تعیین دوربین تصویربرداری و تنظیمات آن، طراحی، جانمایی و ایجاد تارگت های سیستم مختصات مبنا و تارگت های اندازه گیری روی سازه و تعیین ایستگاه های تصویر برداری (موقعیت، تعداد، شرایط) تعیین می گردد. هر اپک مشاهدات شامل تصمیم گیری در خصوص روش کالبراسیون و انجام آن، برداشت مشاهدات در قالب تصویربرداری از سازه، و انجام توجیهات و محاسبات جهت تعیین مختصات نقاط در سیستم مختصات مشترک در هر اپک می باشد. در نهایت با مقایسه مختصات دو یا چند اپک با یکدیگر، میزان جابجایی ها در نقاط تعیین می گردند.
در نتیجه باید شرایط خاص سازه مورد اندازه گیری بررسی و پارامترهای خاص مربوط به آن تعیین گردند. منظور از این پارامترها شرایط غیرقابل تغییری از پروژه است که باید بر اساس آن طراحی های قرار گرفته در مجموعه ساختار فنی سیستم تعیین تکلیف گردند. توضیحات مربوط به این پارامترها و طراحی های مربوطه در بخش های بعدی توضیح داده خواهد شد. آنچه مشخص است هر چه پروژه خاص تر بوده و محدودیت های پروژه برای پیاده سازی یک سستم فتوگرامتری بیشتر باشد، طراحی های مربوطه نیز باید متناسب و خاص آن پروژه پیکربندی گردند. بنحوی که شاید حتی نیاز به طراحی متدهای محاسباتی جدید و بکارگیری ابزارها و متدهای پیاده سازی خاص و نوین وجود داشته باشد.
نکته حائز اهمیت این است که عموما در مواجهه با جابجایی سنجی سازه های مختلف بزرگ مقیاس، برای دست یابی به هدف بر اساس ساختار و شرایط متفاوت در چنین پروژه هایی، سیستم فتوگرامتری مورد استفاده باید پیکربندی متناسبی داشته باشد. این بدان معناست که هر آنچه به عنوان جزئی از جابجایی سنجی مطرح می باشد، باید در آن پروژه خاص تعیین تکلیف گردد.
طراحی ساختار و ابعاد تارگت ها با توجه به شرایط پروژه
تارگت های فتوگرامتری در حقیقت نقاط نشانه ای هستند که در بحث جابجایی سنجی بعنوان نماینده از عارضه و جزئی از آن ایجاد می گردند. این نقاط نشانه باید به نحوی باشند که بعنوان نقاط منحصر بفرد در تصاویر تشخیص داده شده و مختصات عکسی آنها بعنوان مشاهده استخراج گردد. در حوزه های مختلف فتوگرامتری برد کوتاه همچون حوزه های صنعتی، میراث فرهنگی، زیر آب و … باتوجه به شرایط و نیازهای پروژه، تارگت های مختلفی نیز با ساختارهای مختلف مورد استفاده قرار می گیرند. در خصوص اندازه گیری بر روی سازه های بزرگ مقیاس، با توجه به ابعاد عارضه و فاصله تصویر برداری، ابعاد تارگت ها نیز عمدتا بزرگ تر از دیگر حوزه ها می باشد. اما با توجه به تحقیقات انجام شده، استفاده از تارگت های دایره ای شکل قابلیت انعکاس نور در تاریکی را داشته باشند، شرایط مناسبی را برای داشتن یک نقطه منحصر بفرد از مرکز تارگت در تصویر های اخذ شده از آن را با توجه به تکنیک های پردازش تصویر می تواند ایجاد نماید. بر این اساس تارگت های بازتابنده دایره ای شکل به همراه فلاش دایره ای برای استفاده در چنین پروژه ای توصیه می گردد.

نمونه های مختلفی از تارگت های کد دار مورد استفاده در تعیین جابجایی
درخصوص ابعاد تارگت ها بطور تجربی می توان گفت کمینه قطر تارگت ها باید حداقل ۵ پیکسل در تصویر را پوشش دهد تا اندازه گیری دقیقی داشته باشیم.یک معادله تجربی برای تعیین کمینه قطر تارگت مطابق رابطه زیر ارائه شده است:

که بیشترین فاصله، دورترین فاصله تارگت تا دوربین، ابعاد سنسور، عرض افقی صفحه سنسور تصویربرداری (عرض فیلم یا قطعه CCD)، ابعاد تصویر، تعداد پیکسل ها در عرض افقی فیلم یا قطعه CCD و فاصله کانونی مجموعه عدسی ها در لحظه تصویربرداری می باشند. رابطه تجربی دیگری بیان می دارد که به ازای هر یک متر فاصله دوربین تا عارضه، تقریبا ۲ میلیمتر به ابعاد تارگت ها باید اضافه شود. در کل آنچه مشخص است با توجه به رنگ زمینه محل نصب تارگت ها و فاصله دوربین تا عارضه، ابعاد تارگت باید به نحوی انتخاب گردد که امکان تعیین مرکز تارگت ها در بد بینانه ترین شرایط نیز امکان پذیر باشد. بنابراین ساخت تارگت ها با ابعاد کمی بیشتر از ابعاد محاسباتی منطقی است. از طرفی باید در نظر داشت با ابعاد بیشتر تارگت ها زمانی که زاویه انحراف ایستگاه دوربین نسبت به تارگت، زاویه بزگتری نسبت به حالت نشانه روی دوربین به تارگت در حالت عمودی باشد، جابجایی پرسپکتیو مرکز تارگت در تصاویر نسبت به مرکز بیضی زیادتر می شود و دقت تعیین مرکز تارگت ها پایین تر خواهد بود.
تعیین و اندازه گیری نقاط کنترل و یا طول میله های مقیاس
در پروژه های جابجایی سنجی به روش فتوگرامتری، نیاز به یک مجموعه تارگت در فضایی از شیء می باشد که متاثر از جابجایی های سازه مورد نظر نباشد. در صورتی که جابجایی سنجی بصورت نسبی مدنظر باشد، مختصات این نقاط ثابت در یکی از اپک ها می تواند به عنوان مبنا فرض شده و سایر اپک ها به کمک این مجموعه نقاط با یکدیگر مقایسه شوند. در چنین حالتی حل مسئله مقیاس از طریق طول های معلوم در مقیاس واقعی و یا همان میله های مقیاس (Scale bar) باید انجام گیرد. اما اگر جابجایی سنجی بصورت مطلق در یک سیستم مختصات خارجی مد نظر باشد، مختصات این نقاط ثابت باید در آن سیستم مختصات تعیین گردد. این کار عموما از طریق دستگاه های توتال استیشن برای این نقاط ثابت که در این حالت به آنها نام نقاط کنترل می توان نسبت داد، انجام می گیرد. بطور کلی نقاط کنترل با پراکندگی فضایی مناسب در پروژه و در تصاویر، جهت توجیه مطلق مدل مورد استفاده قرار می گیرند. همچنین استفاده از میله های مقیاس از کاهش دقت سرشکنی به واسطه ورود خطاهای مختصاتی اندازه گیری نقاط کنترل می تواند تا حدی جلوگیری نماید. بنابراین استفاده از میله های مقیاس با دقت طولیابی بیشتر از نقاط کنترل در آن ها، در کنار استفاده از نقاط کنترل توصیه می گردد.
تعیین دوربین تصویربرداری و تنظیمات آن
یکی از مهمترین ابزارها در پروژه های فتوگرامتری، دوربین تصویربرداری است. دلیل اهمیت این میله این است که پارامترهای مهمی از جمله دقت، تحت تاثیر عواملی از دوربین مانند قدرت تفکیک، میدان دید، فاصله کانونی، ابعاد تصویر و عواملی نظیر آنهاست. دوربین ها از جهت دقت به دو دسته متریک و غیر متریک تقسیم می شوند. دوربین های متریک دوربین هایی هستند که دارای هندسه داخلی مشخص و یا قابل تعیین می باشند، که در طول زمان استحکام هندسی خود را حفظ می کنند. در این دوربین ها پارامترهای کالیبراسیون معلوم بوده و بدون تغییر باقی می مانند.

نمونه ای از یک دوربین DSLR غیر متریک
اصول طراحی شبکه در فتوگرامتری برد کوتاه
رابطه کلی انتشار خطا را می توان بعنوان مبنایی برای طراحی شبکه های فتوگرامتری برد کوتاه به صورت زیر در نظر گرفت (Fraser, 1984):

که در آن متوسط انحراف معیار خطای مختصات XYZ نقاط شئ، q فاکتور طراحی یا ضریب استحکام هنندسی شبکه، k تعداد متوسط تصاویر اخذ شده در هر ایستگاه دوربین، S عدد مقیاس برابر با نسبت d فاصله متوسط دوربین تا شی به c فاصله اصلی دوربین، خطای متوسط مختصات xy نقاط عکسی و خطای متناظر زاویه ای برابر با می باشد. لذا دقت اندازه گیری وابسته به سه پارامتر به سه پارامتر قدرت تفکیک زاویه ای دوربین، استحکام شبکه و مقیاس تصویربرداری است (Fraser, 1997) که در ادامه به شرح آن ها خواهیم پرداخت.
قدرت تفکیک زاویه ای دوربین
منظور از قدرت تفکیک زاویه ای دوربین نسبت خطای استاندارد اندازه گیری مختصات عکسی به فاصله اصلی یا فاصله کانونی دوربین می باشد. خطای اندازه گیری در دوربین های آنالوگ در بهترین حالت ۱ میکرون و در دوربین های رقومی در حدود ۲% تا ۴% ابعاد پیکسل CCD است. در صورتی که تصاویر پوشش کاملی از شیء داشته باشند رابطه زیر را می توان نوشت که در آن r ابعاد فرمت دوربین و R=S.r فاصله متناظر شیءای آن یا ابعاد شیء می باشد. در این حالت دقت نسبی مستقل از فاصله کانونی دوربین است.

هندسه شبکه
یکی از مهم ترین خصوصیات فتوگرامتری برد کوتاه در مقایسه با فتوگرامتری هوایی، به کارگیری شبکه های چند ایستگاهی همگرا در مقایسه با تصویربرداری استریو است. مزایای پیکربندی چند ایستگاهی همگرا در مقایسه با پیکربندی نرمال (استریوسکوپیک) عبارتند از (Fraser, 1997): دقت بالاتر با تعداد عکس کمتر، قابلیت اطمینان بالاتر، توزیع همگونتر خطاها و قابلیت انعطاف بالاتر در طراحی شبکه.
به طور کلی باید بخاطر داشت که دقت اندازه گیری با شبکه چند ایستگاهی همگرا، به راحتی تا ۲۰ برابر دقت اندازه گیری با یک شبکه استریو فتوگرامتری می رسد. مقدار q برای یک شبکه با استحکام معمول بیشتر از ۷/۰ نبوده و در بهترین حالت مقدار آن از ۴/۰ کمتر نمی شود. در شبکه استریو همگونی در جهت نرمال و مماس بر سطح وجود نداشته و qxy حدود یک و qz بسته به B/H عددی بین ۲/۱ و ۴ است (Atkinson, 1998).
پارامتر دیگر مرتبط با هندسه شبکه، k می باشد. اخذ بیشتر از یک تصویر در هر ایستگاه دوربین با دوران ۹۰ درجه نه تنها مشکلات وابستگی پارامترهای خود کالیبراسیون را برطرف می کند، که موجب افزایش دقت اندازه گیری نیز می شود. برای مثال جهت نصف کردن خطای اندازه گیری شیءای در یک شبکه با استحکانم بالا، باید تعداد عکس ها را به چهار برابر رساند.

نمونه ای از یک شبکه همگرا
مقیاس تصویر برداری
در فتوگرامتری صنعتی، حداقل میدان دید دوربین، حدود ۵۰ درجه است، زیرا میدان دید کوچکتر نه تنها دقت توجیه خارجی کمتری را به دنبال خواهد داشت (توجیه یک هرم تصویری باریک در فضا) بلکه محدوده کمتری از شیء در یک تصویر قابل مشاهده خواهد بود. از این رو با فرض ثابت بودن فرمت دوربین، فاصله کانونی نباید از حدی بزرگتر شود. همچنین از دیدگاه طراحی شبکه، فاصله کانونی نباید از حدی کوچکتر شود، زیرا موجب کاهش خطای قدرت تفکیک زاویه ای خواهد شد. اگرچه دوربین های رقومی ضعف فاصله کانونی کوچک – مقیاس تصویربرداری کوچک – را دارند اما مزیت قدرت تفکیک زاویه ای بالا و استحکام بالای شبکه در آن ها باعث شده است که در مقایسه با دوربین های آنالوگ با فرمت کوچک دقت اندازه گیری بالاتری داشته باشند.
بخش قبلی این مقاله تحت عنوان فتوگرامتری برد کوتاه، روشی مناسب برای تعیین جابجایی را از دست ندهید!
مطالب مرتبط:
۱. فتوگرامتری برد کوتاه و کاربردهای آن در میراث فرهنگی
۲. فتوگرامتری پهپاد | استفاده از تکنولوژی پهپاد در تهیه نقشه
۳. در فتوگرامتری برد کوتاه از چه دوربین هایی می توان استفاده نمود؟
برای کسب اطلاعات بیشتر درباره دوره آموزشی پردازش تصاویر پهپاد فتوگرامتری کلیک کنید.




{kind=link}