
اگر کمی دقیق تر به روند توسعه ابزار های بشری نگاه کنیم متوجه این امر میشویم که بشر در ابتدا در راستای رفع نیاز های خود دست به ابداع و اختراعاتی زد تا به کمک استفاده از آن ها زندگی را برای خود آسان تر کند این ابداعات از اختراع چرخ که از دید بشر امروزی بسیار بدیهی و پیش پا افتاده است آغاز شد و تا جایی که تصور بشری هم قادر به مجسم کردنش نخواهد بود ادامه خواهد یافت
اختراع خودرو نیز در جهت پیشبرد این هدف یعنی سهولت جابجایی بشر با سرعت بیشر و راحتی بیشتر مدنظر بود و به نتیجه رسید
در سال 1885 کارل بنز خودرو را به مفهموم نزدیک تر به چیزی که ما نام خودرو روی آن می گذاریم را اختراع کرد آن را برای تست رانندگی در حضور مردم بیرون از کارگاهش برد و با آن تصادف سختی کرد
در 130 سال گذشته بشر سعی کرد تا غیر قابل اعتماد ترین بخش خودرو که همان راننده آن هست را در نظر نگیریم به این منظور اتوموبیل ها مقاوم تر شدند به آن تجهیزات ایمینی اعم از کمربند و کیسه هوا اضافه شد و تا دهه ی گذشته تنها به همین موارد بسنده شد تا اینکه سعی کردیم که خودرو ها رو واقعا هوشمند تر کنیم برای حل این ایراد، به مشکل اصلی نگاه کردیم اشتباه انسانی یعنی راننده ….
اتومبیلهای خودران دیگر تنها در فیلمهای علمی-تخیلی نیستند. شرکتهایی مانند تویوتا و فورد، میلیاردها دلار صرف تحقیق و توسعه این تکنولوژی کردهاند. سرویسهایی مانند UBER و LYFT، که در حال حاضر به رانندگان در قبال رانندگی دستمزد پرداخت میکنند، به زودی کل ناوگان خود را با ماشینهای خودران تجهیز خواهند کرد. در چند سال، خواهیم دید که خودروهای خودران به مشتریان عادی فروخته خواهند شد. اما هنوز هم ترس و وحشتی پیرامون آن وجود دارد. شاید دلیل این مسئله این باشد که اکثر مردم نمیدانند که این ماشینها چگونه کار میکنند
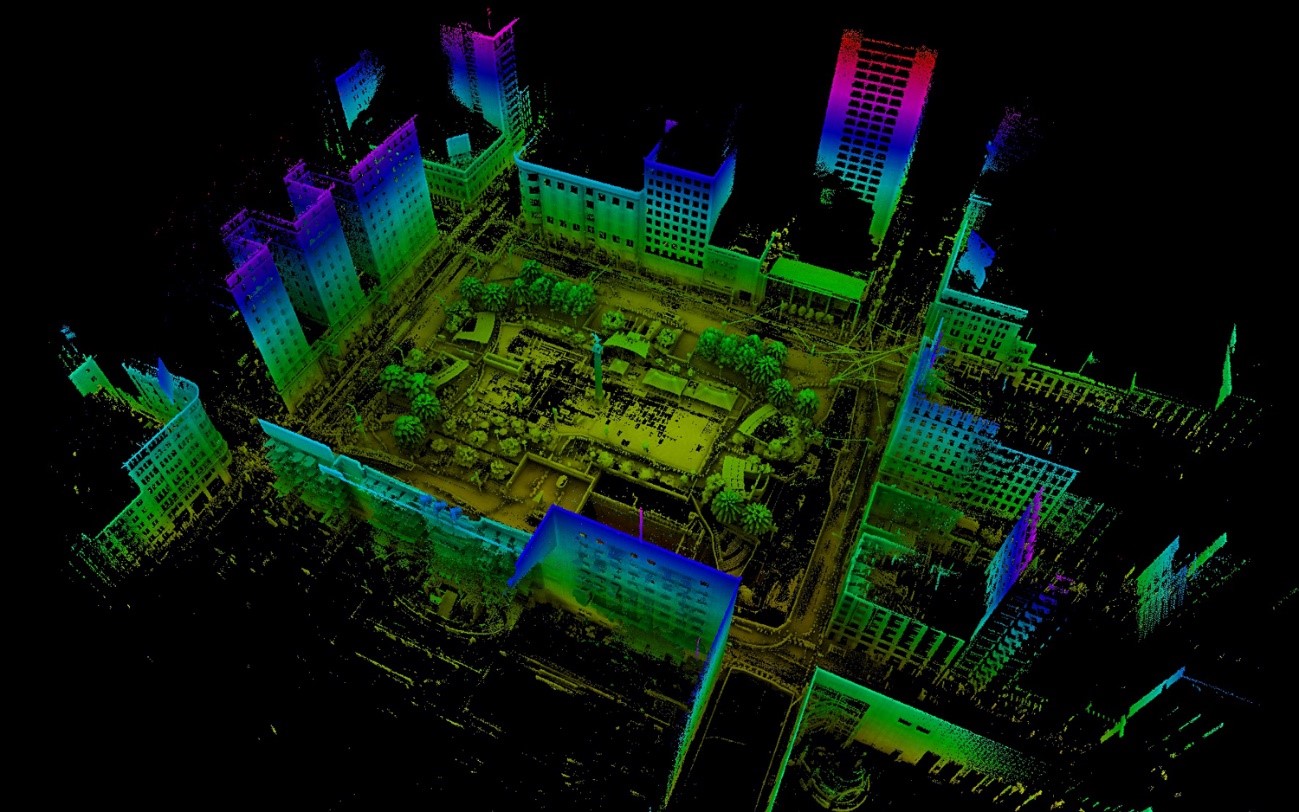
از طرفی با توجه به ارتباط بشر با محیط اطرافش و وجود این پرسش اساسی که ما در کجا قرار داریم و برای رفتن به جای دیگری از چه طریق می توانیم اقدام کنیم از ابتدای تاریخ این نیاز به نقشه به وجود آمد و با پیشرفت بشری بسط و گسترش آن بیش از پیش شد و همچنین ابزار های بدست آوری و جمع آوری اطلاعات مکانی پیشرفت شایان ذکری داشت یکی از ابزار های نقشه برداری LIDAR نام دارد که در پیشبرد این هدف به کمک دیگر فناوری های به بشر امروزی کمک می کند
لیدار چیست و چگونه کار میکند؟
لیدار (LIDAR) مخفف عبارت (Light detection and ranging) تشخیص و اندازهگیری فاصله با استفاده از نور است
و اولین بار در سال 1960 روی هواپیما برای پایش سطح زمین به کار گرفته شد. لیدار، یکی از فناوریهای سنجش از راه دور است که با تاباندن لیزر به هدف و تجزیه و تحلیل نور بازتابشده، فاصله را اندازه میگیرد. لیدار مشابه رادار است که بعضی اوقات نیز رادار لیزری نامیده میشود. اختلاف اصلی لیدار و رادار، طول موجهای تابشی مورد استفاده است. رادار از طول موجهایی در ناحیه رادیویی استفاده میکند در حالی که لیدار طول موجهای لیزری بکار میبرد.
روش متداول برای تعیین کردن فاصله تا یک جسم یا سطح استفاده از پالسهای لیزری است. مانند فناوری رادار که از امواج رادیویی استفاده میکند و فاصله تا جسم با اندازهگیری اختلاف زمانی بین ارسال پالس و دریافت پالس بازتابی تعیین میکنند.
تفاوت لیدار و رادار این است که لیدار از امواج الکترو مغناطیسی استفاده میکنند که طول موجهای کوچکتری دارند. لیدار عمدتاً از طول موجهای مرئی،فروسرخ نزدیک یا فرابنفش استفاده میکند. میتوان جسمی با اندازهای تقریباً برابر طول موج یا بزرگتر از آن را مجسم کرد؛ بنابراین لیدار به ذرات کلوئیدی موجود در هوا یا مایع و ذرات ابر حساس است و کاربردهای زیادی در تحقیقات هواشناسی و جوشناسی دارد.
فناوری لیدار امروزه کاربردهای فراوانی پیدا کرده است و علاوه بر خودروهای خودران، در نقشه برداری از شهرها، باستانشناسی، رباتهای امدادگر و حتی جاروبرقیهای خودکار، استفاده میشود

لیدار به طور اختصار مخفف عبارت تشخیص محیط و محدوده با استفاده از لیزر است. در این فناوری با استفاده از تاباندن نور لیزر در یک زاویه تعیین شده محیط پیرامون به طور دقیق اسکن شده و یک نقشه سه بعدی شامل تمامی اشیا موجود در صحنه تهیه میشود. به دلیل استفاده از لیزر مواردی نظیر فاصله، تعداد و میزان بزرگی اشیاء به خوبی مشخص شده و خودرو میتواند با استفاده از اطلاعات حاصل از این فرآیند مسیر روبرو را با دقت طی کند.
فناوری لیدار بیش از نیمقرن سابقه دارد، بنابراین نمیتوان عنوان یک دستگاه جدید را برای آن به کار برد؛ اما پیشرفت سایر فناوریها کاربردهای جدیدی در صنایع موختلف برای لیدار ایجاد کرده است.
این فناوری از نور برای اندازهگیری فاصله اجسام استفاده میکند. برای درک بهتر میتوان لیدار را شبیه روش دلفینها در تشخیص موانع دانست، با این تفاوت که دلفینها از امواج فراصوت برای اینکار استفاده میکنند و لیدار از امواج الکترومغناطیس (لیزر). لیدار یک موج لیزری ارسال و منتظر میشود تا این موج به مانع برخورد کند و بازگردد، سپس با اندازهگیری زمان رفت و برگشت فاصله آن نقطه تا خود را محاسبه میکند. بنابراین با تاباندن لیزر به تمام نقاط اطراف خود میتواند تصویری سهبعدی از محیطی که در آن قرار دارد رسم کند. برتری لیدار نسبت به رادارها و امواج فراصوت استفاده از لیزر است که تلفات بسیار ناچیزی دارد.
لیدار سریع و بهینه عمل میکند. این فناوری میتواند در زمانی بسیار کوتاه اطلاعات بسیاری گردآوری کند و همین موضوع باعث شده است در خودروهای خودران بسیار مورد توجه قرار گیرد (البته به غیر از خودروهای تسلا.) همانگونه که گفته شد، این فناوری در صنایع بسیاری مانند باستانشناسی، زمینشناسی، کشاورزی، فضانوردی و نظامی کاربرد فراوان دارد.

لیدار در خودروهای هوشمند
اگر تاکنون خودروهای خودران در حال آزمایش را در خیابان یا اینترنت دیده باشید حتما متوجه برجستگی روی سقف آنها شدهاید. این برآمدگی بخشی از سامانه لیدار است که به خودرو کمک میکند در خیابانهای شهر حرکت کند. البته همه خودروهای خودران این فناوری را استفاده نمیکنند. ایلان ماسک، مرد شماره یک تسلا عقیده دارد لیدار فناوری گرانی برای خودروها است. او میگوید این فناوری را در موشکهای اسپیس ایکس استفاده میکند و نیازی به وجود آنها در خودروها وجود ندارد. ماسک ترجیح داده خودروهای خودران این شرکت از دوربین برای پایش محیط اطراف استفاده کنند.
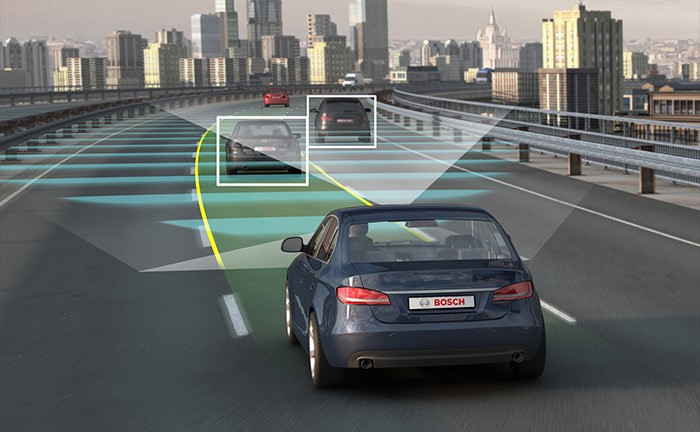
برخلاف سیستمهای سنتی مبتنی بر لیدار، آنچه در خودروهای خودران مانند تویوتا و آئودی مورد استفاده قرار میگیرد، در درجه اول با استفاده از دوربین و رادار محیط را میبینند و جایی که این دو ابزار نتواند اطلاعات لازم را به دست آورد سراغ لیدار میروند و از دادههای آن استفاده میکنند تا قسمتهای ازدسترفته را بسازند.
استفاده از لیدار در خودروهای خودران اولین بار در سال 2005 و در جریان یک مسابقه که توسط دارپا تدارک دیده شده بود به صدر موضوعات داغ راه یافت. در این مسابقه که چالش بزرگ دارپا
DARPA Grant Challenge نام داشت، 15 خودروی خودران در صحرای موهاوه کالیفرنیا با یکدیگر به رقابت پرداختند. در آنجا بود که دیو هال،مدیرعامل شرکت ولودین، دیدگاه خود برای استفاده از این فناوری در خودروهای خودران به اشتراک گذاشت. این مسابقه نقطه شروعی بود برای سایر شرکتها که سعی کنند لیدار را در خودروهای خود مورد استفاده قرار دهند و حالا چند سال پس از آن مسابقه رقابتی دیگر شکل گرفته که لیدار ساخت شرکت دلودین در آن پیشرو است.

ویلودین نام مهمی است که در سالهای آینده با تجاری شدن خودروهای خودران بیشتر آن را خواهید شنید. این شرکت از زمان آغاز رقابت در تولید پایشگرهای لیدار کمتر خودنمایی کرده است و بیشتر به خاطر پایشگرهای کوچک و مقرونبهصرفهاش شناخته میشود. اما هنوز قیمت 4000 دلاری پایشگرهای این شرکت بیشتر از آن است که در خودرو مورد استفاده قرار گیرد. بعضی استارتاپها وعده دادهاند قیمت لیدار را تا 250 دلار پایین بیاورند؛ اما هنوز راه طولانی تا روزی که بتوان این پایشگرها را روی هر خودرویی نصب کرد باقی مانده است.
آینده لیدار چگونه رقم میخورد؟
لیدار یک فناوری ادامهدار و درحال رشد است؛ اما برای استفاده در خودروهای خودران آماده نیست. این فناوری هنوز به دقت لازم برای آنکه هدایت خودرو را از انسان بگیرد نرسیده است؛ به علاوه اینکه قیمت آن هنوز برای استفاده در همه خودروها بالا است. با وجود فناوریهای دیگری که قیمت پایینتر و دقت بیشتر در پایش محیط اطراف دارند شاید دلیلی وجود نداشته باشد که در آینده سازندگان این خودروها لیدار را بهعنوان گزینه اول مورد توجه قرار دهند.
در سالهای اخیر استارتآپهایی با امید پیش بردن این صنعت با ایدهی سامانه ترکیبی لیدار برای خودروهای خودران شکل گرفتهاند. شرکت AEYEحسگر ترکیبی ساخته است که از ترکیب لیدار، دوربین ویژه نور کم و یک تراشه برای اجرای الگوریتمهای هوش مصنوعی استفاده میکند تا اطلاعات مورد نیاز برای هدایت خودرو را تولید کند. هرچند تردید جدی در مورد کارایی یادگیری ماشین برای خودروهای رباتیک وجود دارد.
کوانرجی QUANERGY نام استارتآپ دیگری در سیلیکون ولی است که در حال طراحی و ساخت سامانه لیدار ارزانقیمت است. البته در مورد قیمت نهایی و مقرونبهصرفه بودن محصول نهایی این شرکت نیز شک و تردید جدی وجود دارد. همچنین، شرکت ولودین را داریم که در حال تلاش برای کاهش قیمت حسگرها است. البته پایشگرهای این شرکت نیز از ضعف برد و رزولوشن رنج میبرند که استفاده از آنها برای هدایت خودرو در سرعت بالا را غیر ممکن میکند.

تصمیم تسلا برای کنار گذاشتن لیدار نیز میتواند تأثیر فراوانی بر بازار این فناوری بگذارد. بهخصوص اینکه تسلا جزو اولین شرکتهایی است که خودروهای خودران را معرفی کرده و سطوحی از آن را در خودروهای فعلیاش به کار گرفته است. تسلا نشان داده بدون استفاده از لیدار میتواند بسیار جلوتر از رقبایش (که از لیدار استفاده میکنند) پیش برود. به نظر میرسد با روند فعلی کاهش قیمت و افزایش رزولوشن دوربینها، در آینده دلیلی برای استفاده از لیدار در خودروهای خودران باقی نماند.
VELODNE
کمپانیهای تولیدکننده خودرو در CES 2016 حضور فعالی دارند. کمپانی فورد از جمله خودروسازانی است که آخرین دستاوردهای خود را به این نمایشگاه آورده است. این کمپانی از سنسوری رونمایی کرده که معتقد است باعث پیشتازی خودروهای بدون رانندهی این برند در دنیا میشود.
در جریان CES 2016 کمپانی فورد از ابزار جدیدی رونمایی کرده که معتقد است به کمک آن میتواند پیروز میدان نبرد خودروهای خودران باشد. این سنسور سبک که اندازهی یک قوطی قهوه است، LIDAR نام دارد و توسط کمپانیVELODYNE INCتوسعه یافته است. مقر این شرکت در سیلیکونولی قرار دارد.
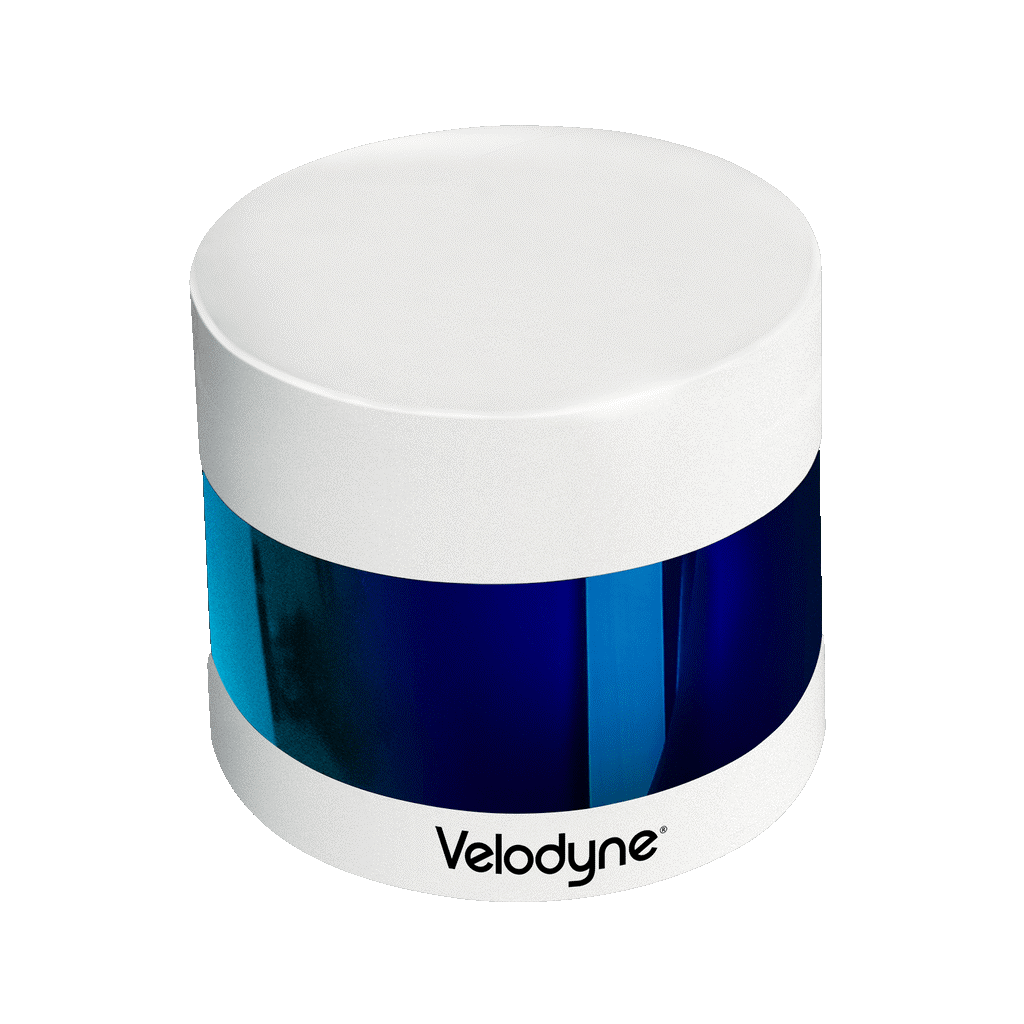
این سنسور نسل سوم به اندازهای کوچک است که به سادگی میتوان آن را بر روی آینهی خودرو سوار کرد. مارک فیلدز، مدیر عامل فورد در جریان کنفرانس خبری این شرکت در CES 2016 اعلام کرد این سنسور قدرتمند 200 متر برد دارد.

فیلدز معتقد است، این سنسور جدید نه تنها بسیار کوچک و زیباست، بلکه میتواند تاثیر زیادی در پیشرفت تکنولوژی مربوط به خودورهای بدون راننده داشته باشد. به لطف سنسور لیدار میتوان نقشهی سهبعدی و لحظهای از محیط اطراف خودروی خودران تهیه کرد و به لطف سیستم تست و توسعهی نرمافزار قدرتمند فورد، حالتهای زیادی از تصمیمگیریهای مختلف برای راندن خودرو ارائه کرد.
خودروهای خودران دیگر مانند خودروی هوشمند گوگل، از سنسورهای LIDAR بزرگتری بهره میبرند که روی سقف خودرو نصب شده است. البته از آنجایی که ایلان ماسک خیلی به سنسور لیدار علاقه ندارد، خودروی بدون راننده این شرکت از لیدار استفاده نمیکند. باید اشاره کنیم که از سنسور LIDAR بر روی برخی از نمونههای اولیه دوربین گوشیهای هوشمند استفاده شده تا امکان ثبت تصاویر سهبعدی فراهم شود. اما در حالی که اکثر سنسورها در اندازه و حجم بزرگ تولید شدهاند، آخرین دستاورد شرکت VELODYNE به خاطر اندازه و برد خود مورد توجه قرار گرفته است.

به گفتهی فیلدز، فورد قصد دارد در ماههای آتی سدانهای فیوژن هیبریدی را به سنسور لیدار مجهز کند. این کمپانی اعلام کرده تا پایان سال جاری میلادی 30 خودروی خودران را در دست تولید دارد و قرار است ناوگان فعلی خود در کالیفرنیا، آریزونا و میشیگان را سه برابر کند.
برخی منتظر بودند تا فیلدز از همکاری فورد با گوگل در زمینهی ادغام برنامههای خودروی بدون راننده اطلاعاتی ارائه کند که این اتفاق رخ نداد. او تنها به این نکته بسنده کرد که به زودی خبرهای بیشتری از همکاری با کمپانیهای دیگر شنیده خواهد شد؛ ولی سخنی از همکاری با شرکتهای مستقر در سیلیکونولی به میان نیامد.
زمانی که گوگل در سال 2008 به طور رسمی اعلام کرد که مشغول کار بر روی خودروی بدون راننده است تقریبا بسیاری از افراد پس از شنیدن این خبر شروع به فکر کردن میکنند که چگونه چنین چیزی امکان پذیر خواهد بود؟
ایده خودرویی که هیچ گونه نیازی به انسان برای هدایت ندارد بسیار جذاب به نظر میرسد. این خودروها هرگز تصادف نمیکنند، دچار حواس پرتی نمیشوند و بدون کوچکترین خستگی میتوانند هزاران کیلومتر را بپیمایند و در تمامی حالات مشغول انجام محاسبات باشند تا سلامت سرنشینان را حفظ کنند.
بر اساس آماری که به تازگی منتشر شده، انسانها در رانندگی واقعا بد عمل میکنند. جاشوا اسکنک سخنگوی مرکز حمل و نقل ENO میگوید:
بشر در امر رانندگی خیلی خوب عمل نمیکند. در ایالات متحده به طور میانگین سالانه 30,000 نفر جان خود را در حوادث رانندگی از دست میدهند. وقتی که صحبت از کنترل خودرو به میان میآید باید گفت که کامپیوتر و ابزارهای الکترونیکی بسیار بهتر از انسان عمل میکنند. آنها به هنگام رانندگی چیزی نمینوشند، مشغول ارسال و مطالعه پیامک نمیشوند و از همه مهمتر اینکه بسیار سریعتر از ما فکر میکنند.

اما مهمترین سوال در این بین این است که خودروی بدون راننده گوگل چقدر مطمئن و ایمن است؟
در پاسخ باید گفت که در طول بیش از 700,000 مایل مسافت طی شده، خودروی گوگل دقیقا دو بار تصادف کرده که جالب است بدانید در هیچ کدام از این دو تصادف نیز خودروی گوگلیها مقصر نبوده است. در اولین تصادف راننده انسانی این خودرو سیستم رانندگی خودکار را خاموش کرده و دومین تصادف نیز هنگامی به وقوع پیوسته که یک انسان مشغول هدایت خودرو بوده است! اما نقطه مقابل و در زمانی که انسان مشغول هدایت خودرو باشد، نتیجه چندان جالب نخواهد بود. آمار تلفات رانندگی در انگلستان به ازای هر 1.7 میلیون مایل مسافت طی شده یک مورد بوده و در آمریکا نیز به ازای هر 1.13 میلیون مایل نیز یک نفر جان خود را از دست میدهد. این در حالی است که با وجود اینکه خودروهای بدون راننده گوگل هزاران کیلومتر مسافت را طی کردهاند آمار تصادف به مراتب کمتری نسبت به خودروهایی ثبت کردهاند که توسط انسان هدایت میشده است.
چه فناوریهایی در خودروی بدون راننده گوگل استفاده شده است؟
آنچه در مورد خودروی بدون راننده گوگل مسلم بوده این است که فناوریهایی که در این خودرو به منظور هدایت آن و حفظ سلامت و ایمنی سرنشینان مورد استفاده قرار گرفته به هیچ عنوان جدید و بدیع از نظر آزمایش شدن نیستند. چه از نظر سخت افزارهای مورد استفاده و چه نرمافزار و الگوریتمهای بکار رفته در این خودرو باید بدانید که گوگل در طراحی سیستم هدایت خودروی خود از فناوریهایی استفاده کرده که بسیاری از آنها سالها است که در حال کار هستند و آزمایشات ایمنی و امنیتی را با موفقیت پشت سر گذاشتهاند. بنابراین جای هیچگونه نگرانی وجود ندارد، چرا که گوگل از فناوریهای تضمین شده در این خودرو بهره جسته است.
در ادامه به بررسی تعدادی از فناوریهای کلیدی مورد استفاده در این خودروی بدون راننده میپردازیم:
خودروی گوگل از ماژول لیزر VELODYNE 64 استفاده میکند. از آنجا که به هنگام رانندگی باید دور و اطراف خودرو به دقت مورد بررسی قرار گیرد این ماژول که مجهز به یک پردازنده نیز هست برای تهیه نقشه 360 درجه بر روی سقف خودرو قرار میگیرد. لیزر تعبیه شده در این ماژول دائما در حال چرخش 360 درجه است تا محیط اطراف را با دقت اسکن کند.

رادار:
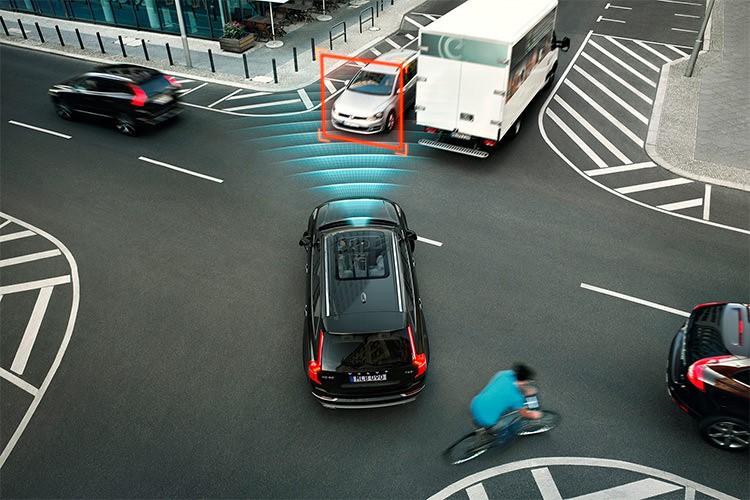
با وجود اینکه لیدار یکی از بهترین ابزارها برای تشخیص دقیق محیط اطراف و تهیه نقشه است، اما یکی از بزرگترین مشکلات آن عدم توانایی در تشخیص سرعت اجسامی است که در حال نزدیک یا دور شدن از خودرو هستند. برای پر کردن این خلاء از چهار سیستم رادار استفاده میشود. نحوه کار گذاری این رادارها بدین شکل است که دو سنسور برای اسکن جلوی خودرو و دو سنسور نیز برای اسکن محیط پشت خودرو مورد استفاده قرار میگیرد. یکی از قابلیتهای سنسورهای رادار امکان ارسال پیام اضطراری به پردازنده برای فعال کردن ترمزهای خودرو به منظور جلوگیری از تصادف است. همچنین اگر خودرو به هر دلیل از مسیر اصلی خود خارج شود با استفاده از دادههای این سنسورها سرعت خود را کاهش داده و متوقف میشود.
این ابزار در تعامل مستقیم با سایر ماژولهای اندازهگیری مانند واحد اندازهگیری لَختی، ژیروسکوپ و رمزگذارهای (Encoder) تعبیه شده در چرخها است که به طور دائمی اطلاعات خود را جهت بررسی به پردازنده مرکزی (مغز خودرو) ارسال میکنند تا از ایجاد تصادف جلوگیری به عمل آید.
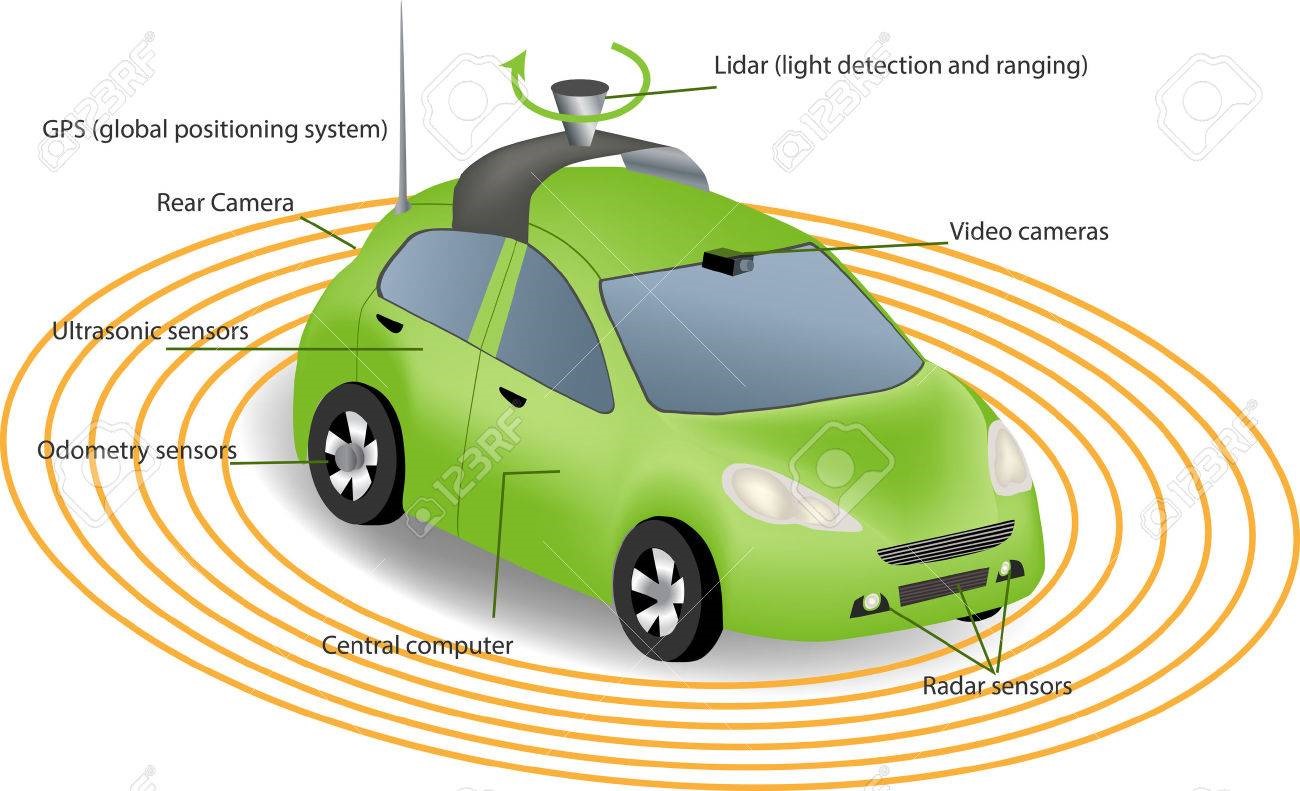
دوربینهای قدرتمند:
فناوری دوربین مورد استفاده در خودروهای بدون راننده متفاوت است. با این اوصاف اغلب خودروهای بدون راننده و هوشمند به منظور استفاده بهینه از دوربین، آن را در قسمت بالایی خودرو و در سقف مورد استفاده قرار میدهند. انجام اینکار باعث خواهد شد تا دوربین که در اصل چشم خودرو محسوب میشود بر محیط اطراف مسلط بوده و دید کامل داشته باشد. فناوری دوربین در این بخش تفاوت چندانی با چشم انسان و سیستم بینایی ما ندارد. در این سیستم تصاویر از طریق دوربین (چشم) به پردازنده (مغز) ارسال شده و سپس مواردی نظیر عمق تصویر، جنبش محیطی و ابعاد اجسام مشخص میگردد.
هر دوربین دارای 50 درجه زاویه دید بوده که میتواند تا حداکثر مسافت 30 متر را به خوبی رصد کند. دوربینهای مورد استفاده بسیار کاربردی بوده و اطلاعات ارزشمندی را در اختیار پردازنده قرار میدهند اما همانند سایر فناوریهای مورد استفاده در خودروی گوگل، دوربین نیز دارای ضریب تاثیر گذاری مشخصی بوده و اطلاعات حاصل از عملکرد آن در تعامل مستقیم با سایر بخشها است. این بدان معنی است که چنانچه به هر دلیل دوربین از کار بیفتد خودرو همچنان با ضریب امنیت بالا به مسیر خود ادامه میدهد و از دست رفتن دوربین باعث نخواهد شد تا کل سیستم دچار مشکل حاد و بحرانی شود. این مورد یکی از قابلیتهای اساسی خودروی گوگل است که از کار افتادن یک یا چند ماژول باعث نخواهد شد تا مشکلی برای خودرو و سرنشینان رخ دهد.
سونار:
نمونههای گوناگون و به اصلاح پروتوتایپهای مستقلی که گوگل از خودروی بدون راننده خود ساخته، از فناوریهای گوناگونی بهره میبرند اما برخی از نمونههای بررسی شده مجهز به فناوری پیشرفته سونار بودهاند.
این ماژول در اصل چشمی است که با استفاده از امواج صوتی کار میکند. نمونه واقعی این سنسور در طبیعت به طور کامل و دقیق در خفاشها وجود دارد. خفاش چشمان ضعیفی داشته و عموما مواقعی به شکار میپردازد که نور محیط به شدت کم بوده و عملا امکان مشاهده محیط از طریق چشم وجود ندارد. در این روش از سونار استفاده میشود. در سونار یا مسیریابی صوتی، اصوات با فرکانس بالا ارسال شده و پس از برخورد به جسم مورد نظر برگشت داده میشود و از این طریق میتوان به مشاهده محیط اطراف پرداخت.
سونار به خودی خود دو مشکل عمده دارد. اول زاویه دید محدود و دوم محدوده عملکرد موثر آن ( که حدود 6 متر) است. این ماژول نیز همانند سایر ماژولها بوده و اطلاعات خروجی آن در تعامل مستقیم با خروجی ماژولهای دیگر بوده و از دسترس خارج شدن آن باعث به وجود آمدن مشکلات حاد نخواهد شد.
تثبیت موقعیت:
یک خودروی فاقد فرمان، پدال ترمز و پدال گاز، خواهد شد بدون بهرمند شدن از یک سیستم مکان یابی و تثبیت موقعیت حرفهای و قطعا بدون استفاده خواهد بود. بدون وجود سیستم موقعیت یابی، خودروی بدون راننده قادر به حرکت نبوده و نمیتواند مسیر حرکت خود را تعیین کند.

به منظور مقابله با این چالش، گوگل از سرویس قدرتمند نقشه خود بهره جسته است. اطلاعات حاصل از سرویس نقشه گوگل، به طور مستمر با دادههای دریافتی از ماهوارههای GPS، واحدهای اندازه گیری لحظهای و ماژولهای رمزگذاری مورد استفاده در چرخها ترکیب شده تا سرعت خودرو به طور دقیق تعیین شود.
این سیستم در تعامل مستقیم با دوربینها به منظور پردازش اطلاعات جهان واقعی و دادههای حاصل از GPS و سرعت رانندگی به منظور تعیین موقعیت دقیق خودرو است. علی رغم اینکه این سیستم از ضریب خطای بسیار اندک (در حد چند سانتیمتر) برخوردار است اما با استفاده از الگوریتمهای تصحیح خطای هوشمند، این خطا در هر لحظه تصحیح میگردد تا از بروز تصادف، ترافیک و سد معابر خودداری به عمل آید.
نرمافزار خبره:
نرمافزار تمام اطلاعات دریافتی از ماژولها را بصورت بلادرنگ و در لحظه پردازش میکند. اینکار شامل مدل سازی دینامیک رفتاری سایر رانندگان و خودروها، افراد پیاده دور و بر خودرو و به طور کلی تمامی اجسامی است که در اطراف خودرو حضور دارند. در حالی که برخی از دستورات و اقدامات از پیش برای سیستم تعریف شده، نظیر توقف در زمانی که چراغ راهنمایی قرمز است، مابقی تصمیمات و عملکردها بر اساس تجارب کسب شده از رانندگیهایی که قبلا صورت گرفته اتخاذ میشود. هر متر از مسافت طی شده توسط خودرو به صورت دقیق تحلیل و ذخیره میشود. این داده پردازش شده تا در زمانهای آینده و در شرایط غیر قابل پیش بینی بهترین تصمیم اتخاذ شود.

الگوریتم یادگیرنده مورد استفاده در این نرمافزار تنها به پردازش اطلاعات و دادههای مربوط به خودرویی که شما سوار آن هستید اتکا نمیکند بلکه دادههای سایر خودروها به صورت شبکهای نیز بررسی و تحلیل میشوند تا بتوان در لحظه تصمیمات درست را اتخاذ کرد. دینامیک رفتاری نیز به صورت دائمی تحلیل شده و یک نقشه جامع تهیه میشود. هدف از انجام اینکار پیش بینی اتفاقات پیش از وقوع است. این موضوع دقیقا شبیه به آن چیزی است که در مورد انسان و در مغز او رخ میدهد. به عنوان مثال این خودروها به اندازه کافی هوشمند هستند تا در موارد و موقعیتهای گوناگون خود را با شرایط تطبیق داده و بهترین تصمیمات را بگیرند.
این موقعیتها عبارتاند از:
خودرویی که با سرعت کم در منتهی الیه خطکشی سمت راست جاده حرکت میکند و یک خودرو با سرعت بیشتر آنرا تعقیب میکند به احتمال زیاد به این معنی است که قرار است یک سبقت صورت گرفته و خودروی سریعتر از خودروی کم سرعت عبور کند.
وجود یک گودال در مسیر یا یک شی خارجی در خیابان به این معنی است که راننده به احتمال بسیار زیاد به منظور جلوگیری از برخورد با آن مسیر خود را به طور ناگهانی تغییر خواهد داد.
ازدحام در خط عبور منتهی الیه سمت چپ به این معنی است که راننده به احتمال زیاد مسیر خود را تغییر داده و خطوط سمت راستی را برای ادامه مسیر انتخاب میکند
موارد و مشکلاتی که باید پیش از استفاده گسترده از این خودروها بر طرف شوند
با وجود اینکه فناوری مورد استفاده در خودروی گوگل چیزی فراتر از شگفت انگیز است اما این بدان معنی نخواهد بود که هیچ مشکلی وجود نداشته و همه چیز به خوبی پیش میرود. هنوز مواردی وجود دارد که میبایست تا پیش از ورود به عصر خودروهای بدون راننده حل و رفع شوند.
فناوری:
پیش از آنکه بخواهیم به مشکلات پیرامون خودروهای بدون راننده اشاره کنیم، مهم است بدانیم که فناوری همچنان بزرگترین مانع ورود این وسایل نقلیه مدرن به بازار محسوب میشود.
یکی از همین مشکلات که گوگل با آن مواجه است سازگاری سیستم نقشه و تعیین موقعیت است. نقشهای که در این خودروها مورد استفاده قرار میگیرد بسیار متفاوت از بخش GPS یا سرویس نقشه گوگل است که همه ما روزانه از آن استفاده میکنیم. نقشه مورد استفاده در این خودروها بیش از آنچه تصور کنید دقیق و شامل جزئیات است. به عنوان مثال محدودیت ارتفاع خودرو و موقعیت و اندازه خطوط راهنمایی موجود در مسیر از جمله این اطلاعات میباشند.
این سطح از جزئیات به قدری زیاد و گسترده است که تهیه نقشه اینچنینی از یک کشور و حتی جهان بسیار مشکل خواهد بود. در حال حاضر گوگل موفق شده حدود 2000 مایل از مسیری که خودروی هوشمند قادر به تردد در آن است را نقشه برداری کند. برای آنکه دید بهتری به موضوع پیدا کنید جالب است بدانید تنها در ایالت کالیفرنیای آمریکا بیش از 170.000 مایل جاده و خیابان وجود دارد و بیش از 4 میلیون مسیر جهت تردد خودرو در کل ایالات متحده ساخته شده است.

شاید اکنون متوجه شده باشید که علت عملکرد موفق خودروهای هوشمند گوگل در طی مسیر 700.000 مایلی چیست. این خودروها در واقع مسیر 2000 مایلی از پیش نقشه برداری شده را بارها با موفقیت طی کردهاند. این بدان معنی است که تمامی این خودروها به تنهایی و به صورت بلادرنگ موفق نشدند در تمامی حالات، تصمیمات اساسی اتخاذ نمایند. گوگل نیز تاکنون در مسیری غیر از مسیر 2000 مایلی خود این خودروها را آزمایش نکرده است. البته این مشکلی نیست که نتوان آن را حل و فصل کرد. هر کدام از خودروهای بدون راننده گوگل علاوه بر طی مسیر به صورت درست و صحیح وظیفه دیگری دارند که بسیار مهم و حائز اهمیت است. وظیفه مهم دیگر آنها تهیه نقشه 3 بعدی از مسیرها برای استفاده توسط خودروهای بدون راننده دیگر است.
سایر مشکلات مربوط به فناوری عبارتاند از:
مشکلاتی وجود دارند که باعث خواهند شد این خودروها نتوانند در شرایط بارانی، برفی و بارندگی سنگین به رانندگی بپردازند.
در شرایطی که سنسورهای تشخیص رنگ چراغ راهنمایی مقابل تابش مستقیم نور خورشید و بازتابش نور شدید باشند به اصلاح کور خواهند شد و این امکان وجود ندارد که تصمیم درست در چهارراهها و سایر مکانهایی که از چراغ راهنمایی استفاده شده اتخاذ شود.
سنسورها اشیاء را به صورت شکلهای پیکسلی تشخیص میدهند. بنابراین، این امکان وجود دارد که همانگونه که برای جلوگیری از برخورد با یک کودک خودرو ناچار به تغییر مسیر ناگهانی است، همین کار را در مورد روزنامهای که در هوا معلق است نیز انجام دهد.

قوانین و مقررات دولتی:
بر اساس قانونی که در ایالت کالیفرنیا تصویب شده، حداقل در مقر مدیریت مرکزی گوگل این امکان وجود دارد که خودروهای بدون راننده به طور قانونی به حرکت بپردازند.
بر اساس قانونی که حدود یک سال و نیم پیش در کالیفرنیا به تصویب رسید به وضوح مشخص است که امکان عبور و مرور خودروهای بدون راننده در این ایالت به صورت قانونی وجود دارد. ما نیز امیدواریم بتوانیم این قانون را در سایر ایالتهای آمریکا نیز به تصویب برسانیم.

کریس آرمسون، مدیر بخش خودروی بدون راننده گوگل در ادامه میافزاید مطمئن نیست که بسیاری از دولتها در سراسر جهان حتی تصور حضور خودروهای بدون راننده را کرده باشند و آن را در قوانین و مقررات راهنمایی و رانندگی خود پیش بینی نموده باشند. چندان دور از ذهن نیست که برخی از دولتها به این راحتی قانع نشده و راسا بخواهند تحقیقات مفصلی در مورد استفاده از خودروهای بدون راننده جهت تصویب قوانین مربوطه به انجام برسانند.
آیا مشتریان مایل به خریدن چنین خودرویی هستند؟
استفاده از فناوری و محصولات مبتنی بر فناوری شگفتانگیز مینماید و بسیاری از افراد را به هیجان میآورد. اما در این بین هستند افرادی که از فناوری واهمه دارند و علت آن نیز کاملا طبیعی است؛ حفظ جان و امنیت.

برخی بر این باورند که هر لحظه ممکن است کنترل خودرو به هر دلیل از دست خارج شده و سلامت سرنشینان به خطر افتد.
البته میتوان دلایل گروه دوم را نیز قابل احترام و مهم تلقی کرد چرا که با وجود اینکه فناوری توانسته بخش گسترهای از زندگی انسان مدرن را دستخوش تغییرات بنیادین کند، اما سپردن کنترل یک خودروی متحرک به طور کامل به دست فناوری امری ترسناک به نظر میرسد؛ جدای از اینکه باید در کنار امنیت، هزینه استفاده از چنین فناوری را نیز در نظر داشت چرا که ممکن است آنقدر گران باشد که کمتر کسی بتواند خودروهای مجهز به چنین امکاناتی را خریداری کند.
در حالی که ترس از ایمن بودن فناوری رانندگی کماکان وجود دارد اما باید اذعان داشت که خودروی گوگل تاکنون توانسته آمار خوبی در مورد امنیت خودرو و سرنشینان را از خود به جا بگذارد.
یک مسئله فلسفی را نیز باید به مشکلات بالا افزود. این مسئله که به «مشکلات واگن برقی» معروف است یک واژه فلسفی است که حالتی را شرح میدهد که هیچ پاسخ صحیح و درستی در کار نیست. به عنوان مثال فرض کنید برای جلوگیری از برخورد با یک کودک مجبور به تغییر ناگهانی مسیر میشود. با انجام اینکار به طور حتم به مادر کودک و یا گروهی از کودکان که در سمت دیگر مسیر هستند برخورد خواهد کرد. در این حالت خودروی گوگل چه کار خواهد کرد؟
البته مطرح ساختن چنین سوالاتی به نظر غیر منصفانه میرسد چرا که اگر همین سوال را از یک انسان که مشغول رانندگی با یک خودرو بوده و در چنین شرایطی قرار بگیرد، بپرسیم قطعا پاسخ درستی دریافت نمیکنیم!
آینده خودروهای بدون سرنشین:
در مجموع این موضوع بسیار جالب به نظر میرسد که میتوان از جنبههای گوناگون فناوری در سایر ابعاد زندگی روزمره نیز استفاده کرد. به عنوان مثال، خودرویی که به راننده نیاز ندارد، حتی به سرنشین نیز نیازمند نیست و میتواند بدون نیاز به انسان وظایف خود را به خوبی انجام دهد. با استفاده از این فناوری میتوانید بستههای پستی خود را درون یکی از این خودروها قرار داده و بدون نیاز به حضور خودتان آنها را به مقصد ارسال کنید؛ کاری کنید که خودرو، دوستتان را به مقصد برساند و مجددا بازگشته و خود را درون پارکینگ خانه پارک کند یا زمانی که شما برای انجام کاری از آن پیاده شدید به صورت خودکار در اولین مکان مناسب پارک کند و منتظر شما بماند.
اما هیجان انگیزترین بخش این ایده آن است که در عمل عبارت «مالکیت» خودرو به مرور منقرض خواهد شد. این خودروها را میتوانید در هر محلی رها کنید و سازمانها و شهرداریها میتوانند از آنها به عنوان جایگزینی مطمئن برای تاکسیها استفاده نمایند. همچنین نیازی نخواهد بود تا بعد از این یک خودروی شخصی و اختصاصی برای خود تهیه کنید چرا که خودروهای بدون راننده در همه حال و در همه شرایط در اختیار شما خواهند بود.
استفاده از خودروهای بدون راننده مسئلهای است هیجان انگیز که آینده حمل و نقل را دستخوش دگرگونی اساسی خواهد کرد. اما تا زمانی که گوگل با چالشهای فنی و ساختاری که در بالا به آنها پرداخته شد به طور کامل مقابله نکند و اثبات ننماید که این خودروها در واقع ایمن تر از خودروهای معمولی ما هستند، این وسایل نقلیه شگفت انگیز در حد یک ایده باقی خواهند ماند و رنگ واقعیت را نخواهند دید. اما آن چیزی که باعث خواهد شد تا نسبت به آینده این وسایل امیدوار باشیم کمپانی گوگل است که با برخورداری از نیروی متفکر و خلاق کارآمد و بهرمند بودن از منابع مالی خوب جهت پشتیبانی کافی از این پروژه، ما را هر روز به دیدن یکی از همین خودروهای بدون راننده در خیابانهای شهر نزدیکتر میکند. شکی نیست که در آینده نه چندان دور عبارت «حمل و نقل» معنایی بسیار متفاوت از آن چیزی که اکنون شاهدش هستیم خواهد داشت.
نتیجه گیری :
باتوجه به پیشرفت روز افزون علم و تکنولوژی می توانیم شاهد تغییراتی شگرف در زمینه اتومبیل های خودران باشیم و این فناوری مقدور نیست مگر با ترکیب علوم مهندسی از جمله ژئوماتیک و برق که تلفیق آنها را میتوانیم در سامانه GPS و همچنین LIDAR مشاهده کنیم از طرفی چوت غول های فناوری در پی دستیابی به تکنولوژی های پیشران در این زمینه هستند میتوان تخمین زد که سرمایه و بودجه هنگفتی در این چرخه صرف خواهد شد که به بروز سامانه های جامع تری منتهی خواهد شد
در این تحقیق سعی بر آن بود که آشنایی نسبی با این مفاهیم بدست آوریم و اهمیت علوم ژئوماتیک را در بازار روز تکنولوژی بدانیم امید که ثمربخش بوده باشد
با تشکر فراوان از استاد ارجمند جناب دکتر مستوفی استاد راهنما و مدیر گروه رشته ژئوماتیک دانشگاه تهران جنوب
نویسنده: امیرحسین جبه دار
مطالب مرتبط:
۱. چرا در هواپیمای سرنشین دار با دوربین متریک و gnss/imu دقیق، بحث حذف نقاط کنترل زمینی مطرح نمی شود.
۲. گروه مشاوران Weaver پهپاد Delair UX11 را برای نقشه برداری بزرگ مقیاس تصویب کرد
۳. Topcon یکپارچه سازی پیشرفته Bentley را برای پردازشهای فتوگرامتری هوایی اعلام کرد.

{kind=link}