
تفکیک پایه GPS و پسا پردازش کینماتیک
مشتریان Geo-MMS ما با استفاده از سیستم هواپیماهای بدون سرنشین نقشه برداری لیدار ما اغلب این سوال را می پرسند، “سیستم ما تا چه حد می تواند برای پردازش داده های PPK از ایستگاه پایه پرواز کند؟”.پاسخ کوتاه به این سوال حدود 10 مایل (15 کیلومتر) است. دلیل این امر مستلزم توضیح دقیق تر در مورد اصول پایه و اساسی سیستم GPS است.
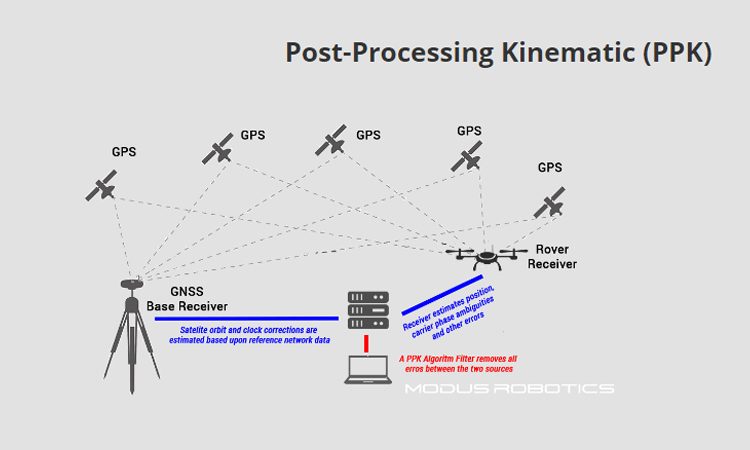
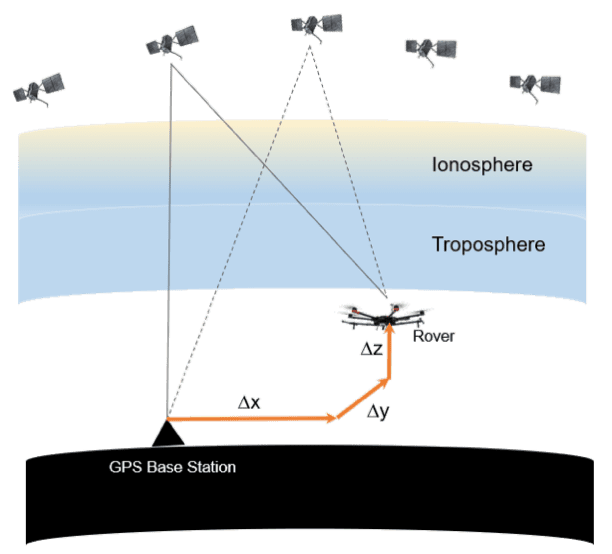
در پردازش PPK، آنچه محاسبه می شود موقعیت نسبی متحرک (پهپاد) با توجه به ایستگاه پایه است، همانطور که در شکل زیر نشان داده شده است. با استفاده از تکنیک های پردازش نسبی پایه-متحرک PPK، بسیاری از خطاهای مرتبط با GPS (پایه و متحرک) (منظور از پایه و متحرک ایستگاه پایه و متحرک است) حذف می شوند که این امر منجر به بهبود دقت در سطح سانتی متر می شود. با این وجود، یک منبع خطا در گیرنده های GPS وجود دارد که به طور کامل قابل حذف نیست مگر اینکه از دو گیرنده در فاصله نسبتا نزدیک به یکدیگر استفاده کرد. این ها خطاهای اتمسفری (یونوسفر و تروپوسفر) هستند.
شکل 1: ایستگاه پایه GPS، پسا پردازش کینماتیک (PPK).
از آنجا که سیگنال های GPS از ماهواره های GPS موجود در فضا به سمت گیرنده های GPS روی زمین فرستاده می شوند، این سیگنال ها از چندین لایه اتمسفر از جمله یونوسفر و تروپوسفر عبور می کنند. این لایه های اتمسفری سرعت حرکت سیگنال های GPS را تحت تاثیر قرار می دهند زیرا سیگنال ها دیگر در یک خلا عبور نمی کنند بلکه از اتمسفر عبور می کنند. این تغییر در سرعت (تاخیر سیگنال) بر مشاهدات GPS در گیرنده های پایه-متحرک GPS تاثیر می گذارد و منجر به ایجاد خطاهای بزرگ در دقت موقعیت می شود. برای از بین بردن این خطاهای اتمسفری، گیرنده پایه GPS و گیرنده متحرک GPS باید تحت تاثیر شرایط اتمسفری مشابه واقع شوند زمانی که هر دو گیرنده نزدیک هم کار می کنند. هرچه این گیرنده ها از یکدیگر فاصله داشته باشند، همانقدر سیگنال های عبور شده دو گیرنده از اتمسفر متفاوت خواهد بود. با تشخیص تاخیرات اتمسفری مشابه، می توانیم این تاخیرها را از هم متمایز کرده و از این طریق دقت بدست آمده را بهبود بخشیم. به همین دلیل است که یک خط پایه کوتاه بین پایه-متحرک ایده آل و مناسب است. اگر سیستم را در یک عرض جغرافیایی بالا، خط های مبنای کوتاه عملیاتی می کنید، کمتر از 5 مایل، توصیه می شود، زیرا دما و شرایط جوی به طور اتفاقی و ناگهانی در این مناطق (عرض های جغرافیایی بالا) تغییر می کند.
برای کسب اطلاعات بیشتر در مورد محصولات ما و مجموعه محصولات Geodetics Geo-MMS در خبر نامه ماهانه ما ثبت نام کنید.
منبع: geodetics.com
مطالب مرتبط:
۱. افزایش کارایی فتوگرامتری پهپاد
۲. Geodetics محصولات سیستم موبایل لیدار خود را افزایش می دهد
۳. داده های شدت لیدار و کاربردهای آن چیست؟



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}