
اصول طراحی شبکه
رابطه کلی انتشار خطا را می توان به عنوان مبنایی برای طراحی شبکه های فتوگرامتری برد کوتاه بصورت زیر در نظر گرفت (Fraser, 1984):

که در آن متوسط انحراف معیار خطای مختصات XYZ نقاط شئای، q فاکتور طراحی یا ضریب استحکام هنندسی شبکه، k تعداد متوسط تصاویر اخذ شده در هر ایستگاه دوربین، S عدد مقیاس برابر با نسبت d فاصله متوسط دوربین تا شیء به c فاصله اصلی دوربین، خطای متوسط مختصات xy نقاط عکسی و خطای متناظر زاویه ای برابر با می باشد. لذا دقت اندازه گیری وابسته به سه پارامتر به سه پارامتر قدرت تفکیک زاویه ای دوربین، استحکام شبکه و مقیاس تصویربرداری است. (Fraser, 1997).
قدرت تفکیک زاویه ای دوربین
منظور از قدرت تفکیک زاویه ای دوربین نسبت خطای استاندارد اندازه گیری مختصات عکسی به فاصله اصلی یا فاصله کانونی دوربین می باشد.خطای اندازه گیری در دوربین های آنالوگ در بهترین حالت ۱ میکرون و در دوربین های رقومی در حدود ۲% تا ۴% ابعاد پیکسل CCD است. در صورتیکه تصاویر پوشش کاملی از شیء داشته باشند رابطه زیر را می توان نوشت که در آن r ابعاد فرمت دوربین و R=S.r فاصله متناظر شیءای آن یا ابعاد شیء می باشد. در این حالت دقت نسبی مستقل از فاصله کانونی دوربین است.

هندسه شبکه
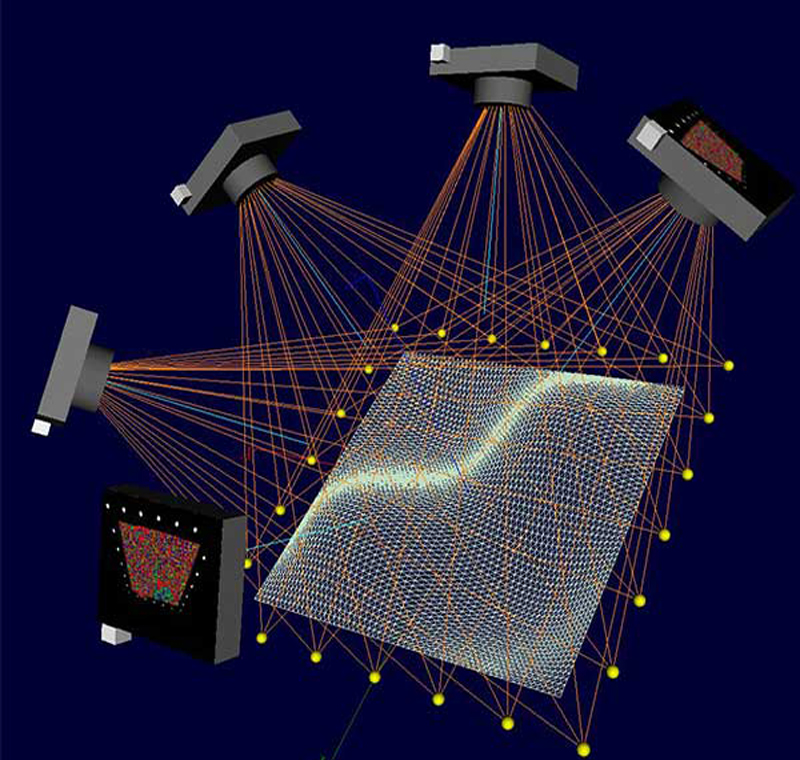
یکی از مهمترین خصوصیات فتوگرامتری برد کوتاه در مقایسه با فتوگرامتری هوایی، بکارگیری شبکه های چند ایستگاهی همگرا در مقایسه با تصویربرداری استریو است. مزایای پیکربندی چند ایستگاهی همگرا در مقایسه با پیکربندی نرمال ( استریوسکوپیک) عبارتند از ( Fraser, 1997) : دقت بالاتر با تعداد عکس کمتر، قابلیت اطمینان بالاتر، توزیع همگونتر خطاها و قابلیت انعطاف بالاتر در طراحی شبکه.
بطور کلی باید بخاطر داشت که دقت اندازه گیری با شبکه چند ایستگاهی همگرا، براحتی تا ۲۰ برابر دقت اندازه گیری با یک شبکه استریو فتوگرامتری می رسد. مقدار q برای یک شبکه با استحکام معمول بیشتر از ۷/۰ نبوده و در بهترین حالت مقدار آن از ۴/۰ کمتر نمی شود. در شبکه استریو همگونی در جهت نرمال و مماس بر سطح وجود نداشته و qxy حدود یک و qz بسته به B/H عددی بین ۲/۱ و ۴ می باشد. (Atkinson, 1998).
پارامتر دیگر مرتبط با هندسه شبکه، k می باشد. اخذ بیشتر از یک تصویر در هر ایستگاه دوربین با دوران ۹۰ درجه نه تنها مشکلات وابستگی پارامترهای خودکالیبراسیون را برطرف می کند، که موجب افزایش دقت اندازه گیری نیز می شود. برای مثال جهت نصف کردن خطای اندازه گیری شیءای در یک شبکه با استحکانم بالا، باید تعداد عکس ها را به چهار برابر رساند.
مقیاس تصویر برداری
در فتوگرامتری صنعتی، حداقل میدان دید دوربین، حدود ۵۰ درجه است، زیرا میدان دید کوچکتر نه تنها دقت توجیه خارجی کمتری را بدنبال خواهد داشت (توجیه یک هرم تصویری باریک در فضا) بلکه محدوده کمتری از شیء در یک تصویر قابل مشاهده خواهد بود. از اینرو با فرض ثابت بودن فرمت دوربین، فاصله کانونی نباید از جدی بزرگتر شود. همچنین از دیدگاه طراحی شبکه، فاصله کانونی نباید از حدی کوچکتر شود، زیرا موجب کاهش خطای قدرت تفکیک زاویه ای خواهد شد. اگرچه دوربین های رقومی ضعف فاصله کانونی کوچک – مقیاس تصویربرداری کوچک – را دارند اما مزیت قدرت تفکیک زاویه ای بالا و استحکام بالای شبکه در آن ها باعث شده است که در مقایسه با دوربین های آنالوگ با فرمت کوچک دقت اندازه گیری بالاتری داشته باشند.
قیود مطرح در طراحی شبکه
با توجه به مباحث فوق بنظر می رسد طراحی شبکه چیزی جز بکارگیری یک شبکه ژنریک و اعمال قواعد هندسه شبکه، مقیاس تصویربرداری و قدرت تفکیک زاویه ای دوربین نمی باشد. در حالیکه وجود قید دید متعدد بهم وابسته که پیش شرط تشکیل تصویر مناسب هستند و فرآیند طراحی شبکه را مقید می سازند، اثر قابل توجهی روی پیکربندی ایستگاه های دوربین گذاشته و موجب پیچیدگی طراحی می شوند. از طرف دیگر معیارهای کیفیت نظیر دقت، قابلیت اعتماد و هزینه، طراحی شبکه را امری بیش از پیش پیچیده می سازند. علاوه بر قیود مرتبط با معیارهای کیفیت، قیود دید مؤثر بر طراحی شبکه را می توان به سه گروه قیود مرتبط با فاصله، قابلیت دید، و قابلیت دسترسی دوربین تقسیم نمود.
قیود مرتبط با فاصله دوربین – شی
این قیود محدود کننده فاصله بین ایستگاه و شی بوده و شامل عمق میدان، تعداد و توزیع نقاط تارگت (حد پایین فاصله)؛ و مقیاس عکسبرداری، قدرت تفکیک سنجنده ها، میدان دید دوربین و فضای کاری (حد بالای قاصله) می باشند.
قید عمق میدان
قید عمق میدان محدوده ای از عمق شی است که برای یک فاصله مشخص بین دوربین و شی، تصویر حاصل شارپ و واضح باشد. این قید علاوه بر فاصله، بستگی به پارامتر های داخلی دوربین شامل f-stop، فاصله کانونی و ابعاد پیکسل CCD دارد که معمولا در فتوگرامتری برد کوتاه، مقادیری ثابت در نظر گرفته می شوند.

در رابطه فوق dfar و dnear به ترتیب دورترین و نزدیک ترین عمق از شی است که در آن برای دوربین به فاصله d از شی، تصویر مربوطه واضح می باشد و با خارج شدن از این محدود، تصویر به تدریج تار می گردد. در این رابطه f فاصله کانونی، f-stop پارامتر مربوط به دریچه دیافراگم دوربین و δ در دوربین های رقومی برابر ابعاد پیکسل و فاصله فرا کانونی ( فاصله ای که اگر دوربین از آن دورتر رود حد بالای عمق میدان بینهایت شده و تصویر شی همیشه واضح است) می باشند. به طور تجربی مشخص شده است که اشیاء در فاصله ۱۰f همیشه در عمق میدان قرار می گیرند. به عبارت دیگر، برای یک دوربین رقومی با فاصله کانونی چند سانتیمتری، شی در فاصله بیشتر از نیم متری همیشه واضح دیده می شود.

قید قدرت تفکیک
قید قدرت تفکیک به قابلیت شناسایی و آشکارسازی تارگت ها در تصویر اشاره داشته و باید به حدی باشد که اندازه گیری تصویر به دقت δ برسد. این امر هم روی تارگت ها و هم بر روی انتخاب مقیاس تصویر موثر است. در رابطه زیر حداکثر فاصله دوربین از شی که ناشی از محدودیت قدرت تفکیک است، نشان داده شده است.

در این رابطه زاویه برخورد امتداد اپتیکی دوربین با صفحه تارگت ها، ابعاد تارگت به میلیمتر، حداقل تعداد پیکسل های تصویر تارگت ها ( معمولا بین ۵ تا ۱۰ پیکسل) و قدرت تفکیک تصویر (ابعاد پیکسل به میلیمتر) است.
قید میدان دید دوربین
قید میدان دید علاوه بر حداکثر فاصله مجاز، بر قابلیت دید هم موثر است. در اینجا منظور از ارضای قید میدان دید دوربین این است که دوربین در فاصله ای از جسم قرار گیرد که تمامی یا بخشی از شئ مورد نظر تصویر برداری فضای تصویر را پوشش دهد. بعبارت دیگر دوربین نباید آنقدر دور باشد تا کل شئ تنها در یک ناحیه کوچک از تصویر ظاهر شود. لذا می توان برای هر امتداد مرکزی دوربین نسبت به شئ یک حد فاصله را محاسبه نمود که بیش از آن تصویر کل شئ از ابعاد عکس موچکتر می شود. در این حالت نه تنها اثر مشاهده عکسی بر دقت نقاط بواسطه فاصله زیاد کاهش می یابد بلکه کلیه نقاط در ناحیه متراکم شده و قید پراکندگی نقاط عکسی ارضاء نمی شود. بعلاوه تصویر تارگتها ریز شده و قید قدرت تفکیک ارضاء نمی گردد.
قید مقیاس تصویر
قید مقیاس عکس مبین حدی از فاصله متوسط بین ایستگاه های دوربین و شئ است که بیش از آن دقت نقاط ارضاء نمی گردد. این قید مبتنی بر رابطه اساسی انتشار خطاست که دیدی کلی از طرح اولیه شبکه به دست می دهد. با تعیین خطای اندازه گیری مورد نیاز، حداکثر فاصله (حداقل مقیاس) بصورت زیر قابل محاسبه خواهد بود.

در این رابطه f فاصله کانونی، K تعداد تکرار عکسها (یا جابجایی جزئی دوربین)، Sp عدد خطای نسبی اندازه گیری مورد تقاضا(معمولا در فتوگرامتری برد کوتاه عددی بین ۲۵۰۰۰ تا ۲۰۰۰۰۰
می باشد)، حداکثر قطر شئ ، خطای اندازه گیری مختصات عکسی، q استحکام هندسی شبکه
می باشد. توضیح اینکه q عددی بین صفر و یک بوده و استحکام شبکه همگرا نسبت به شبکه استریو است و عموما آنرا ۰٫۶ در نظر می گیرند. (Atkinson 1980)
قید فضای کاری
قید فضای کاری عموما محدوده عمل مجاز اپراتور جهت عکسبرداری از شی می باشد که توسط موانع طبیعی یا کارفرما مشخص می شود. برای مثال دیوارهای اتاقی که شئ در آن اندازه گیری
می شود بعنوان قید حداکثر فاصله دوربین از شئ بنام عمل نماید. هنگامیکه هیچ اطلاعاتی از شئ و محیط اطراف آن برای مدلسازی قید فضای کاری در دسترس نمی باشد، میتوان در اکثر اوقات امیدوار بود با ارضای قید میدان دید این قید نیز ارضاء گردد مگر اینکه فضای کاری بسیار محدود (کمتر از ابعاد شئ) باشد، یک راه موجود برای ارضای این قید در محیط های کاری با فضای محدود، بکارگیری عدیسیهای با زاویه بازتر و یا تصویر برداری پوششی از بخشهای مختلف شئ از هر ایستگاه دوربین می باشد.
به این ترتیب بصورت کلی می توان گفت حداکثر فاصله مجاز بین دوربین و شئ برابر با حداقل فواصل محاسباتی از دو قید مقیاس و میدان دید و حداقل فاصله مجاز برابر با حداکثر فواصل محاسباتی از دو قید عمق میدان و تعداد نقاط تصویری است.(Saadatseresht et al. 2001)

اگر Range>0 نباشد یا سازه بسیار کوچکی باشد، یک یا چند قید فوق مشکل ساز بوده و باید پارامتر های مربوطه (با توجه به روابط ریاضی هر قید) طوری تنظیم شوند که مشکل مرتفع شود.
قید مرتبط با قابلیت دید تارگت
قابلیت دید یک نقطه شئ لی از یک ایستگاه دوربین، موضوع پیچیده ای است که به کیفیت تصویر و قیود هندسی بستگی دارد. کیفیت تصویر به شرایط نوری، تنظیمات دوربین و کیفیت CCD بستگی دارد (Fraser 1976) . از آنحایی که این پارامتر ها در عمل غیر قابل مدلسازی اند، در فتوگرامتری برد کوتاه که هدف اندازه گیری دقیق تارگتهاست، آنها را با کنتراست بالا در نظر گرفته ( مانند تارگتهای بازتاباننده) و با استفاده از فلاشر های حلقه ای با سرعت بالا و قدرت کم در یک محیط کم نور توسط دوربین با دیافراگم کم، تصویری با کنتراست بسیار بالا در حد تصویر باینری تولید می نمایند که در آن تارگتها براحتی قابل شناسایی اند. دو قید عمق میدان و قدرت تفکیک نیز موثر بر کیفیت تصویری هستند.
قیود هندسی موثر بر قابلیت دید تارگتها به موقعیت و وضعیت دوربین شئ و موانع در محیط بستگی دارد عبارتند از: میدان دید دوربین، زاویه فرود ( یا میدان بازتابش تارگت) و نواحی پنخان. از آنجا که مدل سه بعدی شئ و محیط اطراف آن نا معلوم است، دو قید آخر با سطح بالایی از نا یقیینی بصورت فازی از مشاهدات موجود مدلسازی شده اند.
عدم قابلیت دید تارگتها در تصاویر موجب کم شدن تعداد و تخریب پراکندگی پرتوهای مربوط به تارگت مورد نظر شده و در حالات مرزی از استحکام شبکه می کاهد. این وضعیت در حالاتی که شبکه از استحکام کافی برخوردار است نیز موجب کاهش k شده که کاهش دقت و قابلیت اعتماد را بدنبال خواهد داشت.
قید میدان دید دوربین
قید میدان دید دوربین مبین بخشی هرمی سکل از فضا است که توسط دوربین دیده می شود که شکل، وضعیت و موقعیت آن به ترتیب بستگی به ابعاد قاب دوربین و فاصله اصلی، امتداد محور اپتیکی، و محل اسیتگاه دوربین دارد. این قید همانند یک فیلتر عمل نموده و تنها نقاط داخل فضای قابل دید باید به حساب آورده شود.
قید میدان بازتابش تارگت
قید زاویه فرود یا میدان بازتابش تارگت بخشی از فضا است که در آن پرتوهای تلاقی کننده با تارگت قابل بازتابند. این امر در تارگتهای بازتاببنده که پرتو ورودی روی خودش بازتاب می شود برای زوایای فرود ( زاویه پرتو با صفحه تارگت) کمتر از ۳۰ درجه امکانپذیر نمی باشندو خمچنین در تارگتهای عادی که پرتو ورودی بازتاب روی خودش ندارد نیز پدیده روی هم افتادگی تصویر محدود کننده زاویه فرود است. در این حالت اگر زاویه فرود کمتر از ۲۰ درجه ود تصویر یک تارگت دایره ای شکل بصورت یک بیضی بسیار کشیده غیر قابل تشخیص در می آید. البته شکل، جنس و نوع تارگت در مقدار این زاویه مجاز که محدود کننده مخروط میدان بازتابش است موثر است. برای مثال تارگتهای کروی محدودیت قید زاویه فرود را ندارند. شکل زیر میدان بازتابش تارگتها شامل صفحه ای، پشت به پشت، چرخنده و کروی را نشان می دهد.

قید نواحی پنهان
قید نواحی پنهان مبین امکان قابلیت دید دو نقطه در فضا نسبت ببهم می باشد که در صورت آگاهی از مدل سه بعدی شئ و موانع در فضا، با استفاده از الگوریتم Z-buffer قابل شناسایی است. علت ایجاد نواحی پنهان خود شئ یا موانع موجود در محیط کاری می باشند.
قیود مرتبط با قابلیت دسترسی دوربین
این قیود عموما مستقیما بوسیله کاربر در نظر گرفته نمی شوند و در حین عکسبرداری با توجه به امکانات موجود دسترسی مانند نردبان یا بالابر بطور ضمنی ارضاء می شوند. قابلیت دسترسی ایستگاه دوربین به پارامتر هایی نظیر فضای کاری، موانع، خود شئ و تجهیزات دسترسی بستگی دارد. برای مثال عموما امکان عکسبرداری از دید بالای یک شئ بلند توسط کاربر وجود ندارد. در این حالت مساله استحکام هندسی شبکه را با اضافه کردن تارگتهای کمکی حل می نمایند.(Mason, 1994)
علاوه بر قابلیت دسترسی مکانی، قابلیت دسترسی زمانی نیز گاهی بعنوان یک پارامتر مهم باید در نظر گرفته شود. محدودیت در زمان عکسبرداری یا ناشی از طبیعت اندازه گیری( مثلا اندازه گیری تغییر شکل یک شئ گرم به سرد) یا محدودیت کارفرما (مثلا زمان استراحت یا تغییر شیفت کارگران در خط تولید) می باشد.
مطالب مرتبط:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}