
اثبات توانایی امدادی پهپادهای چند سنجنده ای
مشارکت در مناطق درگیر بلایای طبیعی
زمانی که سانحه ای رخ می دهد، شجاعت و تجربه تیم امدادی به آزمایش گذاشته می شود. آنها هر بار که در طول مامورت امدادی خود پا به منطقه ای می گذارند، با پدیده ای ناشناخته مواجه می شوند. تلاش هایی برای بکارگیری ابزارهای فنی جدید، نظیر پهپادها، برای پشتیبانی از کار آنها با هدف فراهم آوردن شرایط کار ایمن تر برای تیم امدادی و بهبود کارآیی عملیات نجات، به انجام رسیده است. عملیات اکتشافی توسط پهپاد راهی قدرتمند برای غلبه بر خطرهای بالقوه ناشی از کمبود اطلاعات در مناطق تحت تاثیر واقع شده است.
در گذشته وسایل نقلیه هوایی بدون سرنشین بطور خاص مجهز شده (پهپادها) برای بکارگیری در آتش نشانی، عملیات های جستجو، ارسال بسته های اندادی و دیگر امور تاثیرگذار پیشنهاد شده اند. انتظارات زیادی از بکارگیری پهپادها در این نوع از کارها وجود دارد و دلایل آن نیز واضح است: آنها امکان رفتن به مکان هایی که رفت و آمد هواپیماهای دارای سرنشین به آنها بیش از حد خطرناک و یا حتی غیرممکن است را دارند. این یکی از مباحث اصلی در ارتباط با بکارگیری پهپادهاست.
شبیه سازی یک نمای آلوده شده
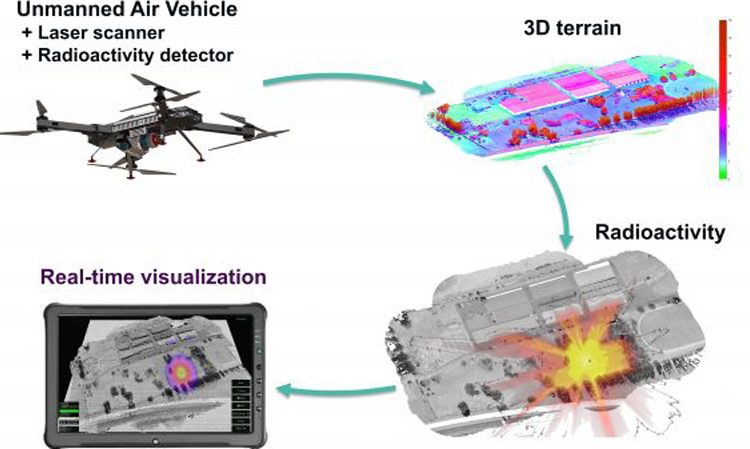
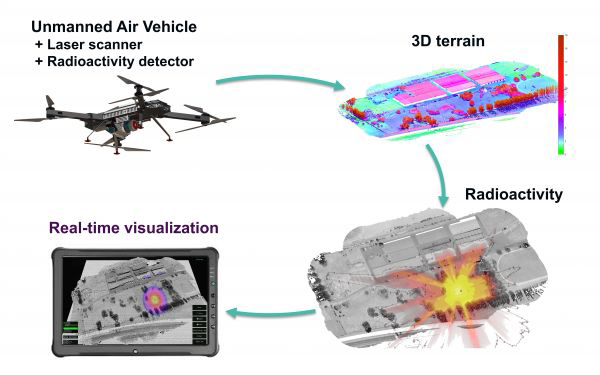
آزمایشی در چارچوب پروژه تحقیقاتی اتریشی با نام SecuRescue انجام شد. سناریوی اضطراری زیر برای راه اندازی این آزمایش در نظر گرفته شد: یک حادثه که در اثر نیروهای طبیعی و یا خطاهای فنی ایجاد شده است، یک منطقه شهری و بخشی از یک ناحیه صنعتی را تحت تاثیر قرار می دهد. اثر آنی این حادثه تخریب کامل آرایه توپوگرافی ناشی از فروریختن ساختمان هاست، که نقشه های موجود را کاملاً بلا استفاده می نماید. تمرکز این آزمایش بر چگونگی فراهم نمودن دسترسی لازم به اطلاعات برای تیم امدادی در کوتاهترین زمان ممکن و در حالت ایده آل بصورت آنی است. به علاوه، منابع خطر نیز که می توانند در بردارنده مواردی نظیر آلودگی در اثر نشت گازهای سمی، خطر بروز آتش سوزی و یا انفجار باشند، باید شناسایی شوند. در این سناریوی آزمایشی، تشعشعات هسته ای به عنوان خطر شبیه سازی شده در نظر گرفته شد.
این سناریو در بردارنده بیشترین شاخص های ممکن برای بازتاب مناسب پیچیدگی های چنین موقعیت هایی است. نیروهای امدادی با چنین سناریوهایی که در آنها همه چیز قابل رخ دادن بوده و هیچ چیز قابل رد کردن نیست، آشنا هستند. ساخت سناریویی مانند این به توضیح راه حل های فنی ای که برای مقابله با آنها باید بکار گرفته شوند نیز کمک می کند: چه نوع اطلاعاتی حیاتی هستند، چگونه باید به آنها دست یافت و به تیم امداد ارائه نمود، و چگونه یک پهپاد می تواند در چنین شرایطی بصورت ایمن بکار گرفته شود. ضوابط عملکردی و ملاحظات روش شناسی در هنگام انتخاب پیکربندی سیستم سنجنده و همچنین پهپادی که به عنوان سکوی حامل خدمت خواهد نمود، باید در نظر گرفته شوند.
بکارگیری لیدار برای دست یابی به دقت و اطمینان پذیری بیشتر
سامانه لیداری RIEGL VUX-1UAV برای اخذ اطلاعات توپوگرافی با دقت به روزرسانی شده بکار گرفته شد. VUX-1UAV یک اسکنر لیزری از رده نقشه برداری است که آینه دوران کننده ای با زاویه دید ۳۳۰ درجه داشته و نرم اندازه گیری توسط آن تا ۵۰۰۰۰۰ نقطه در ثانیه است. این یک اسکنر لیزری بسیار سبک وزن و فشرده است که چالش های پهپادهای مورد نیاز برای نقشه برداری در هر دو جنبه عملکرد اندازه گیری و یکپارچی سیستم را برآورده نموده است. در شرایط معمول، داده های اندازه گیری شده با VUX-1UAV در یک هارد SSD داخلی ذخیره شده و پس از اخذ داده ها بصورت آفلاین پردازش می شوند. با در اختیار داشتن مجموعه ابزارهای مرتبط با پسا پردازش، می توان به دقت اندازه گیری ۱۰ میلیمتری دست یافت.

بر اساس اظهارات دکتر Martin Pfennigbauer، مدیر بخش فناوری و تحقیقات شرکت RIEGL، چالش اصلی مرتبط با این حقیقت است که اطلاعات معمولاً در طول پسا پردازش داده های لیداری حاصل می شوند. اگرچه، زمان اساس یک ماموریت امداد و نجات محسوب می شود، نیروهای امدادی با اطلاعات فوری برای دسترسی ایمن به زمین نیاز دارند. بنابراین، درحالیکه اخذ داده های دقیق و قابل اعتماد در ظرفیت پذیرفته شده برای لیدارهای به روز نقشه برداری بصورت مناسب انجام می گیرد، انتخاب بخشی از داده ها که اطلاعاتی در ارتباط با اهداف توجیه و محلی سازی را در بردارند، از میان حجم عظیم داده ها، و ارسال این داده ها بصورت آنی، کاری مشکل و پیچیده است.
بکارگیری GNSS برای پردازش آنی
بنابراین، روش پردازش داده ها بصورت آنی بر یک ساز و کار پردازشی کاملاً متفاوت تکیه دارد. داده های خام اسکن لیزری فوراً پردازش شده و با داده های مسیر پرواز آنی تولید شده توسط سیستم GNSS/IMU تلفیق می شود. سیستم GNSS به هیچ نوع سیگنال اصلاحی ای دسترسی نداشت و این منجر به دست یابی به دقت ارتفاعی تا ۲ متر شد. روش توصیف شده به یک نرخ خالص ۵۰۰۰۰ عددی برای اخذ و پردازش آنی اندازه گیری ها در هر ثانیه، و یک پهنای باند ۱۰ مگابایت بر ثانیه ای برای ارتباط رادیویی با ایستگاه زمینی نیاز دارد.
سنجنده بازتابی گاما
یک سنجنده بازتابی گاما برای تحلیل آلودگی هسته ای احتمالی مورد استفاده قرار گرفت. وزن لوله نمونه گیری سنجنده بازتابی گامای تجاری در دسترس از طریق بکارگیری یک غلاف سبک وزن سفارشی با حجم ۴۲۰ میلی لیتر، به نحو چشم گیری کاهش یافت. اندازه گیری بازتابی بر مبنای یک جرقه زننده پلاستیکی با یک فوتون افزا انجام می شود. بازتابش های بتا و گامای برخورد کرده با کریستال به عنوان پالس هایی نمایش داده می شوند، که از طریق یک پردازشگر داخلی به تعداد بر ثانیه (CPS) شناسایی شده و تبدیل می شود. ولتاژ بالای مورد نیاز برای اندازه گیری های اصلی در لوله نمونه گیری بازتاب گاما در یک غلاف پوشش دار بخصوص، ایجاد می شود. CPS فعلی بصورت پیوسته و هر ۲۵۰ میلی ثانیه در یک ورودی ارتباطی سریال تهیه می شود. این نرخ اندازه گیری اخذ الگوی بازتاب محلی با قدرت تفکیک بالا را ممکن می سازد. در سناریوی آزمایشی، الگوی پروازی یکسانی در ارتفاعات مختلف بکار گرفته شد تا از جانمایی دقیق منبع بازتاب گاما، که در این مورد منابع بازتاب کبالت و سزیم هستند، پشتیبانی گردد.
کل بار مربوط به سنجنده های سیستم اسکن لیزری و بازتابی که با RIEGL RiCOPTER-M یکپارچه شده اند، در بردارنده یک پهپاد هشت پره ای ۳۵ کیلوگرمی با حداکثر ۱۰ کیلوگرم توان حمل بار است. عملکرد فوق العاده پهپاد (زمان پرواز تا ۳۰ دقیقه در صورت حمل بیشینه بار ممکن) بطور خاص برای عملیات هایی در مناطق حساس طراحی شده است. این پهپادها می توانند بطور اختیاری و برای انجام عملیات های جستجو در شب با پرژکتورهای LED، دوربین های مادون قرمز و دیگر سنجنده ها تجهیز شوند. برای آزمایش فعلی، پروازهایی در روز و تحت شرایط آب و هوایی مناسب به انجام رسیدند.
کمک کردن بدون ایجاد مزاحمت
از آنجایی که RiCOPTER باید حتی بر فراز مناطق پرجمعیت بصورت ایمن قابل بکارگیری باشد، امکان بازگشت دادن تمامی سیگنال های اصلی با خطا مواجه شده را دارد. برای دست یابی به این امکان، دو کنترل گر پرواز مستقل با منابع تغذیه مجزا و سخت افزار حساس اختصاصی (GNSS، ژیروسکوپ، شتاب سنج و قطب نما) بطور کامل با هم همبسته شده اند. طراحی پسشرفته امکان عملکرد با بیشترین قابلیت اطمینان را فراهم می سازد. با این وجود، در حالی که انتظارات از بکارگیری پهپادها در مدیریت بحران بسیار بالاست، همچنان نگرانی هایی در ارتباط با ایجاد اختلال (اگر نگوییم تهدید) در کار تیم های امدادی، خصوصاً زمانی که قصد هماهنگ کردن آنها با تیم های جستجو و امداد با هلیکوپترهای دارای سرنشین را داریم، وجود دارد.

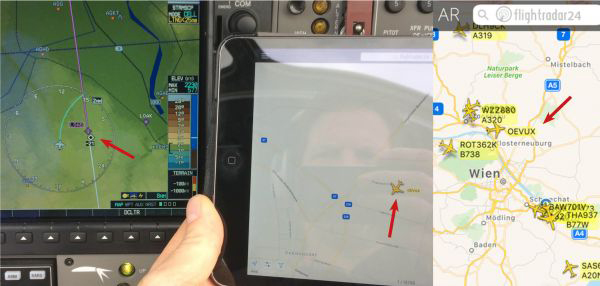
به این دلیل RiCOPTER-M با یک فرستنده گیرنده ADS-B/Mode S شرکت Sagetech، در هماهنگی با مدیریت ترافیک هوایی، بکار گرفته شد. بکارگیری این فرستنده گیرنده روی پهپاد چالش هایی را به وجود آورد: این ابزار باید بطور کامل تحت آزمایش قرار گیرد تا از هرگونه تداخل بین فرستنده گیرنده و کنترل از راه دور پهپاد، سیستم های الکترونیکی همراه و سنجنده های سوار شده جلوگیری شود. این می تواند از طریق نصب آنتن فرستنده گیرنده در یک فاصله مناسب با سیستم های الکترونیکی و آنتن پهپاد، حاصل شود. علاوه بر این احتیاط ها، طراحی و مواد تشکیل دهنده پهپاد نیز می توانند لزوم نصب آنتن را تحت تاصیر قرار دهند. در مورد RiCOPTER-M، بدنه فیبر کربنی هواپیما و محفظه آلومینیومی قطعات الکترونیکی، به عنوان ترکیب مطلوب در پشتیبانی از ترکیب عاری از تداخل مورد قبول قرار گرفته اند. دامنه ارسال حاصل شده از این طریق ۳۰ کیلومتر است.
قوانین هوافضایی بطور واضح اظهار داشته اند که حق تقدم همواره با هواپیماهای دارای سرنشین است، بنابراین مسیر پروازی پهپاد باید بر این اساس انتخاب شود. علاوه بر این حق تقدم در هوا، خلبانان باید هرنوع پهپاد موجود در نزدیکی خود را بطور واضح روی صفحه نمایش خود مشاهده کرده و همچنین امکان تکیه بر هشدارهای مربوط به مدیریت ترافیک هوایی یا جدا نمودن آنها را داشته باشند.
قدم های بعدی
تمرکز این آزمایش تنها بر نتایج نبوده و گردش کار کلی را نیز تحت نظر داشته است. تردیدی در ارتباط با اطلاعات بالقوه موجود در داده های اخذ شده وجود ندارد، اما همیشه جای بهبود و پیشرفت وجود دارد. ایده هایی برای آزمایش های آتی شامل بکارگیری سنجنده های اضافی روی یک سکوی چند سنجنده ای برای دست یابی به اطلاعات بیشتر در آن واحد، و بهبود کیفیت مسیر از طریق ارسال داده های تصحیحی آنی از طریق ارتباط بی سیم داده ای، ارائه گردیدند. در ارتباط با پهپاد حامل، توسعه محدودیت های عملیاتی به سمت شرایطی نظیر وجود آتش، دود و گرد و غبار، که به سادگی در نواحی پس از طوفان مورد انتظار هستند، نیاز به آزمایش های بیشتر خواهد داشت. البته، یک میدان آزمایش مناسب نظارت شده باید برای پرواز در چنین شرایطی در دسترس باشد. این آزمایش ها و بررسی های آتی امکان بکارگیری و مفید بودن پهپادها در مدیریت حوادث و بحران ها و وظایف امدادی را بیشتر به اثبات خواهند رساند.
منبع: gim-international.com
مطالب مرتبط:
۱. بازگشایی نمایشگاه پهپادهای اروپایی در فرانکفورت
۲. نقشه برداری از بزرگترین معدن مس آسیا با استفاده از یک پهپاد
۳. بایدها و نبایدها در به پرواز در آوردن پهپاد



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}