
پردازش تصاویر راداری به روش تداخل سنجی رادار دریچه مصنوعی با استفاده از نرم افزار Doris
نرم افزار Doris یک نرم افزار با دسترسی باز (Open Access) است که به منظور انجام پردازش های تداخل سنجی رادار دریچه مصنوعی طراحی شده است. نرم افزار Doris بر روی سری HP-UX B.10.20 A 9000/780 توسعه داده شده است و به منظور ارتقاء آن به صورت آزاد در اختیار کاربران قرار می گیرد. امکان اجرا کردن این نرم افزار در سیستم عامل های X86 Linux، MS-Windows، SUN، SGI و HP فراهم شده است.

تداخل سنجی رادار دریچه مصنوعی (Interferometric Synthetic Aperture Radar) یا به اختصار InSAR یک تکنیک سنجش از دور است که برای استخراج اطلاعات مربوط به انتشار مکانی یا زمانی فاز بین دو موج متفاوت استفاده می شود. چالش اصلی در پردازش های InSAR، جدا کردن سیگنال های مطلوب همچون مؤلفه های توپوگرافی یا مؤلفه های جابجایی سطحی زمین از کل سیگنال است که این امر با استفاده از نرم افزار Doris Interferometric SAR به سادگی امکان پذیر است. نرم افزار Doris را که نام خود را از Delft Object-oriented Radar Interferometric Software به وام گرفته است، می توان از طریق وبسایت رسمی Delft University of Technology دانلود کرد. امکان اجرا کردن این نرم افزار در سیستم عامل های X86 Linux، MS-Windows، SUN، SGI و HP فراهم شده است.

شکل ۱: فلوچارت پردازش تصاویری راداری به روش InSAR با استفاده از نرم افزار Doris
چالش اصلی در پردازش های InSAR، جدا کردن سیگنال های مطلوب همچون مؤلفه های توپوگرافی یا مؤلفه های جابجایی سطحی زمین از کل سیگنال است که این امر با استفاده از نرم افزار Doris Interferometric SAR به سادگی امکان پذیر است.
پردازش تصاویری راداری در تکنیک InSAR با استفاده از نرم افزار Doris شامل چهار مرحله اصلیRaw Data Processing، Coregistration + Reference Phase، Interferometric Product Generation و Product Generation است. پردازش های Doris به این صورت طراحی شده است که خروجی هر مرحله، ورودی مرحله بعد است. ترتیب و ارتباط بین این مراحل در فلوچارت نشان داده شده است. اجرای مراحلی که در این فلوچارت با رنگ سیاه مشخص شده اند، برای تولید یک اینترفروگرام ژئوکد شده اجباری است. توصیه می شود مراحلی که با رنگ خاکستری تیره مشخص شده اند، اجرا شوند و اجرای مراحل با رنگ خاکستری روشن، اختیاری است. پروسه های مربوط به این مراحل به ترتیب زیر است:
- M_READFILES: در این مرحله، پارامترهای مورد نیاز برای پردازش تصویر راداری Master از فایل SLC خوانده می شود.
- M_PORBITS: اطلاعات مداری دقیق مربوط به تصویر Master در این مرحله با استفاده از پکیج GetOrb به دست می آید.
- M_CROP: در این مرحله، داده های SLC مربوط به تصویر Master از فرمت PAF به فرمت RAW انتقال داده می شوند.

شکل ۲: تصویر Master مربوط به زلزله قشم
- M_SIMAMP: تصویر دامنه Master در این مرحله بر مبنای مدل رقومی ارتفاعی (DEM) شبیه سازی می شود.
- M_TIMING: در این مرحله خطای زمانی تصویر Master بر مبنای همبستگی (Correlation) بین تصویر دامنه شبیه سازی شده و تصویر Master تخمین زده می شود.
- M_OVS: اطلاعات تولید شده از تصویر Master در این مرحله Over-sample می شود.
- S_READFILES: در این مرحله، پارامترهای مورد نیاز برای پردازش تصویر راداری Slave از فایل SLC خوانده می شود.
- S_PORBITS: اطلاعات مداری دقیق مربوط به تصویر Slave در این مرحله با استفاده از پکیج GetOrb به دست می آید.
- S_CROP: در این مرحله، داده های SLC مربوط به تصویر Slave از فرمت PAF به فرمت RAW انتقال داده می شوند.
- S_SIMAMP: تصویر دامنه Slave در این مرحله بر مبنای مدل رقومی ارتفاعی (DEM) شبیه سازی می شود.
- S_TIMING: در این مرحله خطای زمانی تصویر Slave بر مبنای همبستگی (Correlation) بین تصویر دامنه شبیه سازی شده و تصویر Slave تخمین زده می شود.
- S_OVS: اطلاعات تولید شده از تصویر Slave در این مرحله Over-sample می شود.
- COARSEORB: در این مرحله، شیفت بین دو تصویر Master و Slave با استفاده از اطلاعات مداری به هنگام تصویر برداری این تصاویر با دقت ۳۰ پیکسل محاسبه می شود.
- COARSECORR: در این مرحله، شیفت بین دو تصویر Master و Slave با استفاده از روش همبستگی در سطح پیکسل محاسبه می شود.
- M_FILTAZI: تصویر طیفی Master در این مرحله در راستای آزیموت فیلتر می شود.
- S_FILTAZI: تصویر طیفی Slave در این مرحله در راستای آزیموت فیلتر می شود.
- FINE: در این مرحله، بردار های انتقال در سطح زیر-پیکسل (Sub-pixel) محاسبه می شود.
- RELTIMING: خطای زمانی مربوط به تصویر های Master و Slave بر مبنای تناظریابی دقیق محاسبه می شود.
- DEMASSIST: با استفاده از DEM موجود در منطقه برداشت تصاویر، در این مرحله تناظریابی انجام می شود.
- COREGMP: در این مرحله، به منظور تراز کردن تصویر Slave روی تصویر Master یک مدل تبدیل بر مبنای چند جمله ای درجه ۲ محاسبه می شود.
- RESAMPLE: در این مرحله، درجات خاکستری تصویر Slave با توجه به مدل تبدیل در تناظریابی محاسبه می شود.
- FILTRANGE: تصاویر طیفی Master و Slave در این مرحله در راستای برد فیلتر می شوند.
- INTERFERO: در این مرحله، تصویر اینترفروگرام با استفاده از ضرب مزدوج دو تصویر Master و Slave به دست می آید.
- COMPREFPHA: در این مرحله، فاز مرجع بر مبنای بیضوی مرجع محاسبه می شود.
- SUBTRREFPHA: اثر فاز مرجع در این مرحله از فاز تصویر اینترفروگرام حذف می شود.
- COMPREFPDEM: در این مرحله، فاز مرجع توپوگرافی با استفاده از یک DEM محاسبه می شود.
- SUBTRREFDEM: اثر فاز توپوگرافی مرجع محاسبه شده در مرحله قبل، در این مرحله از فاز تصویر اینترفروگرام حذف می شود.
- COHERENCE: در این مرحله، نقشه همبستگی (Coherence Map) محاسبه می شود.

شکل ۳: نقشه همبستگی مربوط به زلزله قشم
- FILTPHASE: در این مرحله، تصویر اینترفروگرام فیلتر می شود.
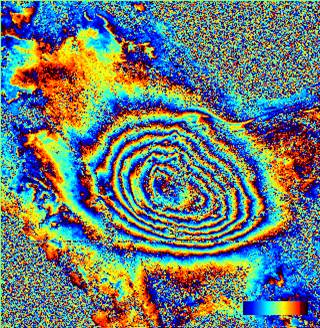
شکل ۴: تصویر اینترفروگرام فیلتر شده مربوط به زلزله قشم
- UNWRAP: ابهام موجود در فاز تصویر اینترفروگرام در این مرحله برطرف می شود.

شکل ۵: تصویر فاز اینترفروگرام پس از ابهام زدایی مربوط به زلزله قشم
- DINSAR: در این مرحله، تداخل سنجی دیفرانسیلی ¾ مسیری انجام می شود.
- SLANT2H: در این مرحله، ارتفاع هر پیکسل در یک سیستم مختصات راداری محاسبه می شود.
- GEOCODE: در این مرحله، مختصات هر پیکسل از سیستم مختصات راداری به یک سیستم مختصات زمین مرجع انتقال داده می شود.

شکل ۶: تصویر جابجایی ناشی از زلزله قشم پس از زمین مرجع کردن آن
پردازش تصاویری راداری در تکنیک InSAR با استفاده از نرم افزار Doris شامل چهار مرحله اصلیRaw Data Processing، Coregistration + Reference Phase، Interferometric Product Generation و Product Generation است. پردازش های Doris به این صورت طراحی شده است که خروجی هر مرحله، ورودی مرحله بعد است.
مراجع:
[۱] وبسایت رسمی Delft University of Technology:
http://doris.tudelft.nl/
http://www.tudelft.nl/en/


{kind=link}