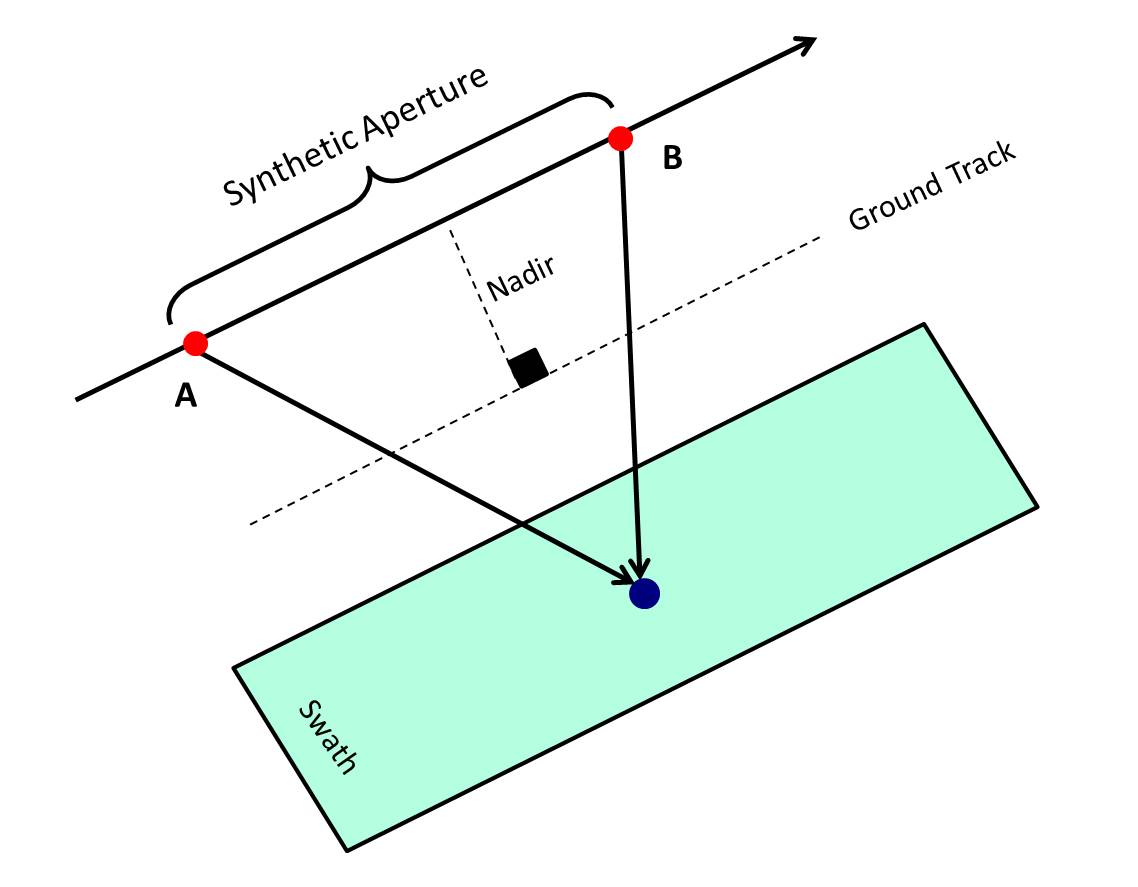
در سالهای اخیر، از رادار دریچه مصنوعی برای تهیه تصاویر راداری با توان تفکیک بالاتر استفاده شده است. در این سیستم تصویر برداری، یک عارضه مشخص در چندین ایستگاه با ارسال پالسهای مختلف اندازهگیری شده و تصویر نهایی آن از ترکیب این اندازهگیریها به دست میآید. فاصله مکانی بین اولین و آخرین پالس ارسالی نیز به عنوان آنتن رادار شبیهسازی میشود.

شبیه سازی آنتن رادار در سیستم SAR
Carl Wiley در سال ۱۹۵۱ ایدهی رادار دریچه مصنوعی را مطرح کرد. رادار دریچه مصنوعی در واقع یک سیستم ثبت و پردازش سیگنال است که در آن طول آنتن رادار برای بالا بردن توان تفکیک تصویر راداری شبیهسازی میشود. شبیهسازی آنتن رادار با ارسال پالسهای مختلف به یک شئ خاص از ایستگاههای مختلف صورت میگیرد.
بسته به پیکربندی سیستم راداری، سنسورهای SAR دادهها را در سه حالت جمعآوری میکنند. توان تفکیک مکانی و پوشش زمینی تصاویر به حالت اتخاذ شده برای عملیات تصویر برداری بستگی دارد. حالات جمعآوری دادههای SAR عبارت اند از:
- StripMap: در حالت تصویر برداری StripMapزاویه دید سنسور ثابت است. در این حالت تصویر با استفاده از فواصل دور نزدیک سنسور و حرکت رو به جلوی سنسور تشکیل میشود (شکل ۱). حالت StripMap متداولترین حالت تصویر برداری سیستم SAR است که در مأموریتهای ERS-1 SAR، ERS-2 SAR، JERS-1 SAR، RADARSAT-1 SAR، RADARSAT-2 SAR، ENVISAT ASAR، ALOS PALSAR، TerraSAR-X، COSMO-SkyMed به کار رفته است.
- ScanSAR: در حالت StripMap سیستم به یک نوار (Swath) برداشت باریک محدود میشود. این محدودیت را میتوان با استفاده از اصول تصویر برداری ScanSAR برطرف نمود. در این حالت، نوار تصویر برداری با به کارگیری آنتنی که ارتفاع آن قابل کنترل و تنظیم است عریضتر میشود. بنابراین، تصاویر راداری میتوانند با اسکن زاویه دید و در نتیجه موقعیتهای مختلف پرتوها شبیهسازی شوند. به منطقهای که توسط یک پرتو خاص تصویر برداری شده، زیر-نوار (Sub-Swath) گفته میشود. در حالت ScanSAR زمان عملیالت رادار بین دو یا چند زیر-نوار تقسیم میشود به نحوی که برای هر یک از زیر-نوارها یک تصویر پوششی کامل به دست آید (شکل ۲).
- Spotligh: در حالت Spotlight پرتوهای آنتن توسط سنسور کنترل میشود به نحوی که پیوسته به هر بخش از زمین سیگنال ارسال شود. در این حالت، توان تفکیک تصویر در راستای مسیر پرواز نسبت به حالت StripMap بهبود مییابد (شکل ۳).

شکل ۱: حالت تصویر برداری StripMap

شکل ۲: حالت تصویر برداری ScanSAR

شکل ۳: حالت تصویر برداری Spotlight
مشاهده سطح زمین در سیستم تصویربرداری SAR در مدارهایی که در امتداد نصف النهارهای زمین طراحی شده اند، صورت میگیرد. بر همین اساس، دادههای خام راداری در دو مسیر پرواز جمعآوری میشوند:
- Ascending Pass: در این حالت حرکت مداری ماهواره از جنوب به شمال است.
- Descending Pass: در این حالت حرکت مداری ماهواره از شمال به جنوب است.
در سیستم تصویربرداری SAR از امواج مایکروویو استفاده میشود. امواج مایکروویو باندهای مختلفی را پوشش میدهند که طول موج آنها در بازه ۸/۰ تا ۱۰۰ سانتیمتر تغییر میکند. طول موج رادار در نحوه تشکیل تصاویر راداری بسیار مؤثر است. در واقع، تصاویری با طول موج پایینتر از توان تفکیک بالاتری برخوردار هستند. هرچندکه معمولا با افزایش طول موج رادار تصاویری با کیفیت بالاتر را میتوان تهیه نمود.
بر خلاف امواج نوری مورد استفاده در تصویر برداری اپتیکی که تنها دارای دامنه هستند، امواج مایکروویو از هر دو پارامتر دامنه و فاز برخوردار اند. دامنه امواج مایکروویو نشان دهنده شدت موج بازگشتی است. فاز این امواج نیز نشان دهنده فاصله بین سنجنده و شئ (Slant Range) است. رابطه بین فاز ()، طول موج () و فاصله سنجنده از شئ () با استفاده از فرمول زیر بیان میشود:
حساسیت فاز به فاصله بین سنجنده و شئ بسیار زیاد است بهطوری که جابجاییای به اندازه نصف طول موج در راستای خط دید ماهواره موجب بروز اختلاف فازی به اندازه ۲π رادیان می گردد.
رادار دریچه مصنوعی در واقع یک سیستم ثبت و پردازش سیگنال است که در آن طول آنتن رادار برای بالا بردن توان تفکیک تصویر راداری شبیه سازی میشود.
در حال حاضر سه حالت تصویر برداری برای رادار دریچه مصنوعی وجود دارد که بسته به حالت اتخاذ شده برای عملیات تصویر برداری، توان تفکیک مکانی و پوشش زمینی تصاویر متفاوت خواهد بود.
بر خلاف امواج نوری مورد استفاده در تصویر برداری اپتیکی که تنها دارای دامنه هستند، امواج مایکروویو از هر دو پارامتر دامنه و فاز برخوردار اند.
منبع:
[۱] “Synthetic Aperture Radar Land Applications Tutorial, Part I: Background and Theory, Prepared by ESSA”, 2009.

{kind=link}