
تعیین موقعیت نقطه ای دقیق (PPP)
تعیین موقعیت دقیق نقطه ای (PPP) چیست؟
PPP یک تکنیک تعیین موقعیتی است که خطاهای سیستم GNSS را حذف و یا مدل می نماید، تا موقعیت را با یک سطح بالای دقت از طریق یک گیرنده منفرد، فراهم سازد. راه حل مبتنی بر PPP به تصحیحات ساعت و مدار ماهواره های GNSS تولید شده از یک شبکه از ایستگاه های مرجع جهانی، وابسته است. به محض اینکه تصحیحات محاسبه شدند، از طریق ماهواره ها و یا اینترنت به کاربران ارسال می شوند. این تصحیحات توسط گیرنده به کار گرفته شده و منتج به تعیین موقعیت در سطح سانتیمتر و یا بهتر، بدون نیاز به ایستگاه مبنا می شوند.
دقت PPP چیست؟
PPP دقتی تا سطح ۳ سانتیمتر را ممکن می سازد. یک راه حل مبتنی بر PPP معمولی، به منظور حل بایاس های محلی نظیر شرایط اتمسفری، چند مسیری محیطی و هندسه ماهواره، نیازمند یک دوره زمانی برای همگرا شدن تا دقت دسیمتر است. دست یابی به دقت واقعی و زمان همگرایی مورد نیاز به کیفیت تصحیحات و چگونگی بکارگیری آنها در گیرنده بستگی دارند.
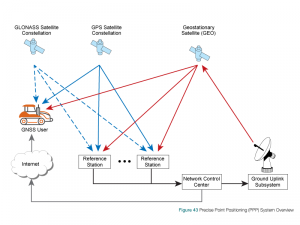
مشابه ساختار یک سامانه SBAS، یک سامانه PPP تصحیحات به یک گیرنده را برای افزایش دقت تعیین موقعیت فراهم می آورد. اگرچه، سامانه PPP معمولاً یک سطح بالاتر از دقت را فراهم نموده و یک هزینه دسترسی به تصحیحات را پدید می آورند. همچنین، سامانه های PPP اجازه ایجاد یک جریان تصحیحی منفرد قابل استفاده در سطح جهانی را می دهند، در حالیکه سامانه های SBAS منطقه ای هستند. یک سامانه PPP معمولی در شکل زیر نشان داده شده است.
 مهمترین منابع خطای PPP به روش های زیر کاهش می یابند:
مهمترین منابع خطای PPP به روش های زیر کاهش می یابند:
عملکرد دو فرکانسه: خطای یونسفری مرتبه اول متناسب با فرکانس موج حامل است. بنابراین، خطای یونوسفری مرتبه اول می تواند بطور کامل از طریق بکارگیری ترکیباتی از اندازه گیری های GNSS دو فرکانسه حذف شود.
داده های تصحیح خطای خارجی: این مورد شامل تصحیحات ساعت و مدار ماهواره می شود. در ارتباط با سرویس TerraStar، تصحیحات ایجاد شده، از طریق ماهواره های ارتباط مخابراتی Inmarsat برای کاربران نهایی منتشر می شوند.
مدل سازی: تاخیر تروپسفری با استفاده از مدل UNB توسعه یافته توسط دانشگاه نیوبرانزویک تصحیح شده است. اگرچه، بخش تر تاخیر تروپسفری بسیار متغیر است و نمی تواند با دقت کافی مدل شود. بنابراین، تاخیر تروپسفری باقیمانده نیز به همراه تعیین موقعیت وسایر مجهولات برآورد می شود. همچنین مدل سازی در گیرنده PPP برای اصلاح اثر جذر و مد زمین جامد مورد استفاده قرار می گیرد.
الگوریتم های فیلتر PPP: یک فیلتر کالمن گسترش یافته (EKF) برای برآورد PPP بکار گرفته می شود. موقعیت مکانی، خطای ساعت گیرنده، تاخیر تروپسفری و ابهامات فاز موج حامل توسط مراحل تکراری EKF برآورد می شوند. EKF نویز سیستم را کمینه نموده و امکان برآورد موقعیت با دقت تا سطح سانتیمتر را فراهم می سازد. برآوردهای مراحل EKF با اندازه گیری های متوالی GNSS بهبود می یابند، تا جایی که به مقادیر دقیق و پایدار همگرا شوند. زمان همگرایی معمول PPP برای دست یابی به دقت زیر ۱۰ سانتیمتر بین ۲۰ تا ۴۰ دقیقه است، اگرچه این زمان به تعداد ماهواره های در دسترس، هندسه ماهواره ها، کیفیت محصولات اصلاحی، خطای چند مسیری محیطی گیرنده و شرایط اتمسفری نیز وابسته است.
چندین شرکت فراهم آورنده خدمات PPP وجود دارند، VERIPOS ،TerraStar،OmniStar و StarFire از آن جمله اند. فراهم آورندگان خدمات PPP در قالب یک شبکه از ایستگاه های مرجع زمینی، برای جمع آوری داده های اصلاحی برای سیگنالهای مختلف منتشر شده از ماهواره، عمل می کنند. تصحیحات محاسبه شده از این داده ها، از طریق ماهواره های زمین ایستا، برای گیرنده های متعلق به کاربران دارای اشتراک انتشار می یابند.
اطلاعات بیشتر در مورد PPP در مقاله راه حل تعیین موقعیت GNSS پیشرفته چاپ شده در نشریه سرعت ۲۰۱۴ نیز در دسترس است. این نشریه بصورت بر خط از طریق آدرس http://www.novatel.com/technology-in-action/velocity/ در دسترس است.
منبع: novatel.com
مطالب مرتبط:
۱. تعیین موقعیت دقیق نقطه ای
۲. گزارش تصویری آموزش کار با گیرنده GPS
۳. آموزش استفاده از نرم افزار Locus Pro نرم افزار تخصصی GPS برای نقشه برداری


{kind=link}