

پیشرفت های اخیر در فناوری های اخذ داده های زمینی
بدون داده، هیچ اطلاعاتی در دست نخواهیم داشت
فناوری های امروزی اخذ داده های زمینی، ریز پردازنده ها، قدرت کامپیوتر، درایوهای حالت جامد، سنجنده های نیمه هادی- اکسید – فلزی (CMOS) مکمل، کوچک ساختن، و بسیاری تحولات دیگر را در هم می آمیزند. اما تقاضا نیز به اندازه عرضه مهم است و این تقاضا به سرعت در دنیای همواره در حال تغییر ما رو به افزایش است. به خواندن ادامه دهید تا جزئیات پیشرفت های اخیر در فناوری های اخذ داده های زمینی را ببینید.
در دنیای امروز، شاهد مجموعه هایی از مادرشهرها هستیم که در حال تبدیل به ابرشهرها هستند، تغییرات آب و هوایی انسان را تهدید می کند، زمین و چهارپایان در مناطق پست نظیر دلتای رودخانه ها و دره ها و مناطق بسیار پرجمعیت در معرض خطرات لغزش زمین و زمین لرزه هستند. تمامی این شاخص ها نیاز به اخذ داده های زمینی را افزایش می دهند.
این مقاله با توتال استیشن ها آغاز می شود، با توسعه های رخ داده در تعیین موقعیت و ناوبری از طریق GNSS ادامه یافته و با سامانه های هوایی بدون سرنشین (پهپادها) و لیدار هوایی پیش تر می رود. سپس نگاهی به قابلیت های نرم افزارهای پردازش ابر نقطه ای و امکانات انطباق تصاویر متراکم کرده، و پیش از اتمام به پیشرفت های اخیر در سنجنده های تصاویر اپتیکی در فضا پرداخته خواهد شد. منابع بکار گرفته شده در بردارنده مقالات کنفرانسی، بروشورها، برگه های حاوی اطلاعات، اوراق شکایت، وب سایت های صنایع و Geo-matching.com، و وب سایت های مقایسه سخت افزاری و نرم افزاری محصولات، هستند.
توتال استیشن ها
یک توتال استیشن (TS) یک تئودولیت ادغام شده با یک فاصله یاب الکترونیکی (EDM) است. مفهوم پایه بکارگیری یک دستگاه برای اندازه گیری فواصل و دو زاویه (افقی و قائم)، در طول زمان تغییری نکرده است (شکل ۱).

شکل ۱- تحولات از تئودولیت به توتال استیشن. از چپ به راست: Wild T3، معرفی شده در ۱۹۲۵؛ Aga Geodimeter 14، تولید شده در ۱۹۷۰؛ EDM سوار شده روی تئودولیت، HP 3820A؛ Leica FlexLine TS02plus (2013)؛ Spectra Precision Focus 35 (2014)؛ Ruide RIS و Trimble S9، هردو از سال ۲۰۱۵٫
تحولات درون این دستگاه ها رخ داده و از پیشرفت های فنی سریعی که خودکارسازی را تقویت می کنند، ناشی می شوند. به علاوه، طراحان صنعتی بطور رو به رشدی ظاهر توتال استیشن ها را با رنگ های برجسته و خطوط مستحکم، تعریف می کنند. یک روز ممکن است فروشنده از شما بپرسد: “می خواهید عکس پرسنلی شما کجا نصب شود؟” در طول زمان مولفه های پایه با بسیاری از ویژگی هایی که برای ساده ساختن عملیات ها و کاهش هزینه های نقشه برداری اضافه شده اند، توسعه یافته اند. موتورهای مغناطیسی پایدار، به سرعت و بدون صدا تلسکوپ را در راستای قائم و افقی حرکت می دهند. تنها لازم است که نقشه بردار به سمت منشور تارگت نشانه روی کند و تلسکوپ موقعیت خود را پیدا خواهد نمود، که این در زمان لازم برای پیاده سازی مختصات، صرفه جویی می کند. موقعیت منشور یا از طریق سیگنال های رادیویی و یا تصویربرداری مشخص می شود. از آنجایی که ارتباطات رادیویی امکان هدایت دستگاه از طریق یک کنترل گر خارجی سوار شده روی پایه را دارد، یک TS رباتیک می تواند تنها توسط یک نفر اداره شود. TS به نقاط مبنایی برای تعیین موقعیت و توجیه نیاز دارد. برای پاسخ به این نیاز، یک گیرنده GNSS می تواند بالای TS و یا روی پایه منشور نصب شود. اگرچه، سیگنال ها ممکن است در نزدیکی درختان و یا ساختمان ها بسیار ضعیف باشند (شکل ۲)، که در این مورد توتال استیشن این وظیفه را به عهده می گیرد. این پیکربندی دوگانه کارایی را در جمع آوری حجم وسیعی از داده ها توسط یک شخص، افزایش می دهد. یک دوربین رقومی نصب شده در تلسکوپ بصورت هم محور با عدسی ها و EDM، مستندسازی تصویری در سایت را امکان پذیر ساخته و امکان نوشتن نکات روی صفحه TS با استفاده از یک قلم رقومی را به وجود می آورد. این از پردازش دفتری پشتیبانی کرده و ممکن است از بازگشت مجدد به زمین جلوگیری نموده و اجازه ایجاد تصاویر قائم را نیز بدهد. تصویربرداری امکان ردیابی و موقعیت یابی منشور را پس از قطع اتصال در اثر عبور عوارض از خط دید را نیز فراهم می سازد. شناسایی تارگت بصورت اتوماتیک، قابلیت انجام مطالعات بدشکلی بصورت خودکار را در سدها و سایر سازه ها فراهم می سازد. اسکنرهای لیزری زمینی (TLSها) به کاربردهای گسترده ای دست یافته اند. یک TLS و یک واحد EDM اشتراکات بسیاری دارند: یک TLS بدون منشور کار می کند، همانطور که TS نیز می تواند، و هردو امکان بکارگیری لیزر پالسی و یا اختلاف فاز را دارند. بنابراین، منطقی به نظر می رسد که یک TS را با قابلیت یک TLS برای جمع آوری ابر نقاط توسعه دهیم. به عنوان مثال، Trimble S9، که در سال ۲۰۱۵ معرفی شده است، عملیات های اسکن، تصویربرداری و نقشه برداری را در هم آمیخته است. بسته به قابلیت بازتاب عارضه، برد آنها بین ۱ تا ۲٫۲ کیلومتر متغیر است.

شکل ۲- میله مجهز شده با یک کنترل گر خارجی، منشور و GNSS (چپ) و آنتن GNSS روی توتال استیشن.
گیرنده های GNSS
تعداد ماهواره های GNSS بطور پیوسته در حال رشد است. ماهواره های Galileo شماره های ۵ و ۶ که Doresa و Milena نام دارند در ۲۲ اوت ۲۰۱۴ پرتاب شدند، اما در مدار ناصحیح قرار گرفتند. دو ماهواره Galileo دیگر، به شماره های ۹ و ۱۰ در ۱۱ سپتامبر ۲۰۱۵ پرتاب شده و تعداد ماهواره ها در پیکربندی را به ۱۰ رساندند. یک ماه و نیم بعد، در ۳۱ اکتبر ۲۰۱۵، پیکربندی GPS آمریکا با ماهواره یازدهم سری GPS IIF، توانمند شد. IIF-12، که آخرین در این سری است، برای پرتاب در ۳ فوریه ۲۰۱۶ برنامه ریزی شده است. ماهواره های GPS IIF دارای ویژگی سیگنال غیرنظامی سوم L5 هستند، که سیگنال های بهبود یافته را فراهم آورده و دقت بیشتری را از طریق ساعت های اتمی بهبود یافته به دست می دهند. تا کنون، پیکربندی GPS دربردارنده دو ماهواره GPS IIA، ۱۲ ماهواره GPS IIR ، ۷ ماهواره GPS IIR-M و ۱۱ ماهواره GPS IIF است. ابزارهای GNSSای امروزی قادر به ردیابی هر چهار پیکربندی GNSS هستند که یا کامل شده اند و یا همچنان در دست توسعه هستند. برخی از آنها قادر به ردیابی سیگنال های سامانه ماهواره ای شبه-زنیتی (QZSS)، که یک پیکربندی ژاپنی در بردارنده ۴ ماهواره خواهد بود، نیز هستند. هدف اولیه QZSS افزایش تعداد سیگنال های GNSS در تنگه های شهری متعدد ژاپن، که در آنها تنها ماهواره هایی که در زاویه بسیار بالایی نسبت به افق هستند در خط دید قرار می گیرند، است. اولین، و تاکنون تنها ماهواره، در ۱۱ سپتامبر ۲۰۱۰ پرتاب شده است. گیرنده های GNSS از رده نقشه برداری، امکان دسترسی به سامانه های تقویت ماهواره ای (SBAS)، به منظور پشتیبانی از مناطق وسیع و GNSS تفاضلی را نیز می دهند. امکانات SBAS برای بهبود دقت GNSS، که سرمایه آن از اموال عمومی تامین شده است، شامل: سرویس تقویتی مناطق وسیع (WAAS) که از ایستگاه های مبنایی توزیع شده در آمریکا بهره میگیرد، سرویس همپوشانی ناوبری زمین ایستای اروپایی (EGNOS)، سامانه تقویت ماهواره ای چند کاربرده ژاپنی (MSAS) و سامانه نمایش فناوری ناوبری تقویت شده زمینی به کمک GPS هندی (GAGAN) است. امروزه، گیرنده های GNSS برای داشتن قابلیت دریافت تمام سیگنال ها برای ردیابی صدها کانال بطور همزمان مجهز شده اند (شکل ۳).

شکل ۳- برخی گیرنده های GNSS معرفی شده در ۲۰۱۵ که می توانند صدها کانال را بطور همزمان ردیابی کنند.
لیدار هوایی
لیدار هوایی مورد استفاده در فناوری نقشه برداری، بطور معمول برای مدل سازی سه بعدی از مناطق شهری برای اخذ جنگل های شمالی، نقشه برداری از بستر دریا و بسیاری کاربردهای دیگر، بکار گرفته می شود. فرکانس شلیک پالس های لیزر رو به رشد بوده و به یک میلیون پالس در ثانیه رسیده است. پالس های چندگانه در هوا و رقومی سازی موج ساخت کامل، دیگر دست یافته های اخیر هستند و امکان پیشرفت بیشتر نیز وجود دارد. در دسامبر ۲۰۱۴ Optech اولین لیدار هوایی چندطیفی دنیا، Titan را معرفی نمود. سه پالس مستقل با طول موج های ۵۳۲، ۱۰۶۴ و ۱۵۵۰ نانومتر، هریک با یک نرخ نمونه برداری ۳۰۰ کیلوهرتزی برای یک نرخ نمونه برداری زمینی مختلط ۹۰۰ کیلوهرتزی، ارسال می شوند. ارتفاع پرواز برای هردو نقشه برداری عمق سنجی و توپوگرافی، حداقل ۳۰۰ متر است، در حالیکه حداکثر ارتفاع بر فراز آب ۶۰۰ متر و بر فراز زمین ۲۰۰۰ متر است. کاربردهای مورد انتظار شامل نقشه برداری زمینی، طبقه بندی پوشش زمینی سه بعدی، مدلسازی محیطی، نقشه برداری از پوشش گیاهی و عمق سنجی آبهای کم عمق هستند. از آنجایی که سه پالس مسیر یکسانی را در هوا طی نمی کنند، نقطه تماس این پالس ها با نقاط یکسانی برخورد نکرده و مقدار بازتابیده از تنها یک باند طیفی به موقعیت x و y اختصاص داده می شود. سه بازتاب می توانند در طول شبکه بندی ادغام شوند، که به یک ابر نقطه ای در یک رستر منتقل می شوند. Riegl VQ-880-G برای نقشه برداری های عمق سنجی و توپوگرافی مختلط طراحی شده است. نرخ اندازه گیری تا ۵۵۰ کیلوهرتز است، در حالیکه ۱۶۰اسکن در هر ثانیه نیز قابل انجام است. در مارس ۲۰۱۴ Swedish Airborn Hydrography AB (AHAB) که از اکتبر ۲۰۱۳ بخشی از Leica Geosystems بوده است، Dual Head را که متشکل از دو اسکنر که ارسال کننده تا ۵۰۰۰۰۰ پالس در هر ثانیه، با نرخ پالس کلی ۱ مگاهرتز هستند، و یک دوربین ۸۰ مگاپیکسلی RCD30 ثبت کننده RGB و مادون قرمز نزدیک است، را راه اندازی نمود. در هنگام پرواز در ارتفاع ۱ کیلومتر، تراکم نقطه ای ۱۶ نقطه در متر مربع است. الگوی اسکن دایره ای است که امکان دریافت تا ۴ بازگشت را برای هر نقطه زمینی فراهم می آورد. یک سنجنده رو به جلو و یکی رو به پشت است، دید مایل منتج شده امکان ثبت نمای هر دو سمت ساختمان ها را فراهم می آورد. عمق یابی می تواند از طریق دو سامانه مایل انجام شود، یکی برای آبهای کم عمق (بیشترین عمق ۱۵ متر، نرخ پالس ۳۵ کیلوهرتزی) و یکی برای آبهای عمیق (بیشترین عمق ۵۰ متری، نرخ پالس ۱۰ کیلوهرتزی)، عمق نفوذ به شفافیت آب وابسته است. هردو سامانه می توانند با DragonEye ادغام شوند تا بطور یکپارچه به اخذ داده ها از بستر دریا و زمین مجاور آن بپردازد.
پهپادها
سامانه های هوایی بدون سرنشنین (پهپادها) در بسیاری از نقشه برداری های دو بعدی و سه بعدی، و وظایف مرتبط با پایش و بازرسی کاربرد پیدا کرده اند. آنها از طریق کنترل از راه دور و یا بطور خودکار و از طریق دنبال نمودن یک مسیر هوایی از پیش مشخص شده، هدایت می شوند. پرواز توسط GNSS جفت شده با یک IMU هدایت می شود و در طول پردازش، داده های GNSS و IMU برای زمین مبنا کردن داده های سنجنده مورد استفاده قرار می گیرند. سنجنده های همراه شامل دوربین های RGB، دوربین های مادون قرمز نزدیک، سنجنده های مادون قرمز حرارتی و لیدار هستند. برخی پهپادها اجازه همراه داشتن دو سنجنده یا بیشتر را به عنوان بار اضافی می دهند. در GIM International UAS Special 2014، من پهپادها را به دو دسته تقسیم کردم: بال ثابت ها و هلیکوپتری ها. نوع اول از قابلیت های بالا برندگی بال ها استفاده می کنند، بنابراین مصرف انرژی کمتر و باقی ماندن در هوا به مدت طولانی تر نسبت به یک پهپاد هلیکوپتری با همان ابعاد، از ویژگی های این نوع است. بال ها اجازه پرواز با سرعت بالا را می دهند و نواحی بزرگتری در هر پرواز را پوشش می دهند. هلیکوپتری ها می توانند شناور بمانند و برخلاف بال ثابت ها به فضای کوچکی برای بلند شدن از زمین و فرود نیاز دارند، چرا که می توانند بطور قائم بالا و پایین بروند. از این رو، یک پهپاد هلیکوپتری برای اخذ داده های ساختمان های منفرد و مناطق کوچک مناسب تر است. آیا انتخاب ما همانطور که برچسب گذاری من نشان می دهد، به دو نوع بال ثابت و یا هلیکوپتری محدود می شود؟ نه، چرا که اخیراً نوع سومی هم ظهور کرده است: پهپاد هیبریدی. Aerolution از برلین اخیراً Songbird 1400 را معرفی نموده است، که اساساً یک پهپاد بال ثابت است، اما با چهار موتور که به سختی روی بالها سوار نشده اند. به جای آن، تیغه ها می توانند از حالت عمودی که برای یک بال ثابت معمول است، به حالت افقی تغییر یابند (شکل ۴). حالت افقی به بال های ثابت قابلیت بلند شدن از زمین و فرود بصورت عمودی (VTOL) مانند یک پهپاد هلیکوپتری را می دهد. پهپاد می تواند بیش از یک ساعت در هوا باقی بماند، یعنی دو تا سه برابر بیشتر از یک پهپاد هلیکوپتری، که امکانات چند پره ای آن تنها برای صعود و فرود مورد استفاده قرار می گیرد. شناور ماندن و سایر مانورهای مشابه پهپاد هلیکوپتری، انرژی را مشابه هلیکوپتری ها مصرف می کنند و در نتیجه زمان در هوا ماندن کاهش می یابد. همچنین، مدل هیبریدی به باند، پرتاب کننده و یا پاراشوت (چتر نجات) نیازی ندارد، که ریسک خسارت به سنجنده های همراه و سایر اجزاء را کاهش می دهد.

شکل ۴- مشابه یک بال ثابت، این پهپاد هیبریدی مزایای یک بال ثابت را با قابلیت VTOL یک پهپاد هلیکوپتری در هم می آمیزد.
ابر نقطه ای
یک ابر نقطه ای مجموعه ای از داده های نقطه ای نشان داده شده با مختصات دوتایی x و y، مقادیر ارتفاع/ عمق و هر توصیف ممکن دیگری شامل شدت های بازتاب و یا RGB از یک تصویر رنگی است. دوتایی x و y و توصیفات از هسته ابر نقطه ای و تعداد هسته ها ممکن است به بیلیون ها برسند. نرم افزار پردازشی ممکن است دارای اهداف کلی بوده و ابرهای نقطه ای از سنجنده های مختلفی را اداره نمایند و یا به عنوان مثال به یک خروجی مشخص از TLSها، لیدارهای هوایی و یا سامانه های نقشه برداری موبایل اختصاص یافته باشند. برخی بسته ها اختصاصی بوده و برای پردازش خروجی های یک سنجنده بخصوص توسعه یافته اند. یک بسته عمومی قادر به اداره تمامی انواع خروجی های سنجنده و تولید تمام انواع محصوات نهایی ای هستند که هنوز وجود ندارند. فروشندگان دریافته اند که مشتریان نیاز دارند که خروجی های خود از سنجنده هایشان را پردازش نمایند و سخت افزارهایشان را با نرم افزار انحصاری برای مدیریت، زمین مبنا کردن، تصویر سازی، ویرایش و خروجی گرفتن به نرم افزار تخصیص یافته، کامل نموده اند. برخی پدید آورندگان نرم افزار پتانسیلی را در ارائه ابزارهایی برای ایجاد یک صفحه از محصولات خروجی لیدار و یا سایر سنجنده ها، احتمالاً بصورت ترکیب شده با داده های سلولی از خود داده های پیکسلی و یا سونار، کشف کرده اند. سایر بسته ها از دامنه های کاربردی ناشی می شوند. پیمان کارانی که به استفاده از سیستم CAD عادت دارند، با مزایای ابرهای نقطه ای TLS آشنا شده و از فروشندگان ماژول هایی برای پردازش آنها را تقاضا نموده اند. برخی سازندگان فرصت های جدیدی را کشف نموده و ماژول هایی اختصاصی را روی یک یا تعدادی از ماژول های اصلی، به عنوان مثال برای اهدافی نظیر صنعت استخراج معادن یا مدل های سه بعدی از مکان های وقوع تصادفات، تعریف کرده اند. این پروسه با کامل شدن فاصله دارد، و ابزارهای جدیدی همواره در حال افزوده شدن هستند. پیش از خرید نرم افزار، باید قابلیت های آن و همچنین ایده های طراحی، ملحقات موجود و یا برنامه ریزی شده، قابلیت اتصال ماژول ها به یک گردش کاری و تعامل متقابل آن با دیگر نرم افزارها و خدمات، مورد بررسی قرار گیرد. شکل ۵ کارکردهای مختلف را طبقه بندی می کند.
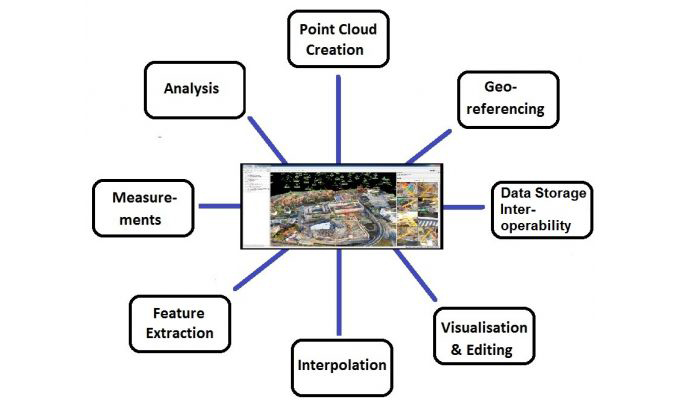 شکل ۵- قابلیت های نرم افزار پردازش ابر نقطه ای طبقه بندی شده در ۸ گروه.
شکل ۵- قابلیت های نرم افزار پردازش ابر نقطه ای طبقه بندی شده در ۸ گروه.
DIM
نرم افزارهای فتوگرامتری امروزی یک زنجیره خودکار، از برنامه ریزی برای پرواز، قابلیت کالیبره شدن دوربین های از رده مشتریان و مثلث بندی هوایی، تا ایجاد DEM و ارتوموزائیک ها و ملحقات آنها، یعنی نماهای سه بعدی و مدل های شهری را به جود آورده اند. یک پیشرفت اخیر انطباق تصاویر متراکم (DIM) است، که محاسبه یک مقدار ارتفاعی و یا عمقی را برای هر پیکسل، و بنابراین تولید مدل های سطحی با قدرت تفکیک بالا (DSMها)، و پس از فیلتر نمودن نقاط بازتابیده شده از ساختمان ها و یا پوشش گیاهی مدل های ارتفاعی رقومی (DEMها) را در گردش های کاری خودکار و یا نیمه خودکار، ممکن می سازد. فاصله نمونه برداری زمینی (GSD) در DSMها و DEMها مشابه تصاویری هستند که از آنها استخراج شده اند، بنابراین یک تصویر با یک GSD 5 سانتیمتری ممکن است تراکمی تا ۴۰۰ نقطه در متر مربع را ایجاد نماید. یک بسته خاص برای ایجاد تصاویر ارتوی حقیقی، DSMها و DEMها که SURE نامیده می شود، در دانشگاه اشتوتکارت توسعه یافته و از طریق موسسه اقماری آن nFrames توزیع شده است. هسته آن بر اساس تغییراتی روی الگوریتم انطباق نیمه کلی شکل یافته است. امروزه، بسته های متفاوتی امکانات DIM را فراهم می کنند. (جدول ۱)
| کشور | شرکت | برند |
| اسلوانی | Modri Planet | ۳Dsurvey |
| کانادا | SimActive | Correlator3D |
| آمریکا | DroneDeploy | DroneDeploy |
| فنلاند | MosaicMill | EnsoMosaic |
| آمریکا | Trimble | Inpho |
| بلژیک | Orbit | Orbit Softcopy |
| سوئیس | Pix4D | Pix$Dmapper |
| روسیه | Racurs | Photomod |
| فنلاند | PIEneering | RapidStation |
| آلمان | nFrames | SURE |
| اتریش | Meixner Imaging | UnlimitedAerial |
جدول ۱- بسته های نرم افزاری فتوگرامتری که امکانات انطباق تصاویر متراکم (DIM) را فراهم می آورند (منبع بخشی از اطلاعات Geo-matching.com است.)
سنجنده های EO اپتیکی با قدرت تفکیک بالا
بیش از ۲۰۰ ماهواره اپتیکی مشاهده زمینی (EO) که توسط ۳۰ کشور اداره می شوند در مدار قرار دارند. فرانسه و آمریکا پرچم دار این عرصه هستند. SPOT 7 فرانسوی در ۳۰ ژوئن ۲۰۱۴ و WorldView-3 شرکت DigitalGlobe در ۱۳ اوت ۲۰۱۴به فضا پرتاب شدند. SPOT 7 پیکربندی چهار ماهواره ای عملیاتی شده در همان مدار مشتمل بر خواهر دوقلویش SPOT 6 و Pleiades 1A& 1B را کامل می کند. هر یک از این دوقلوها فاز ۱۸۰ درجه ای دارند (شکل ۶).
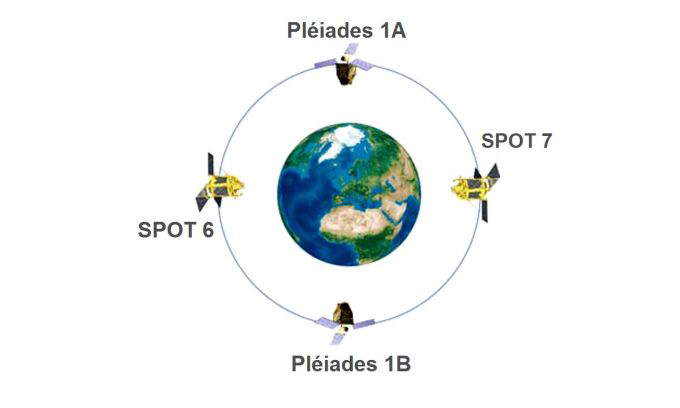
شکل ۶- ماهواره های SPOT 6& 7 و Pleiades 1A & 1B در یک مدار یکسان و با فاز ۱۸۰ درجه ای عملیاتی هستند.
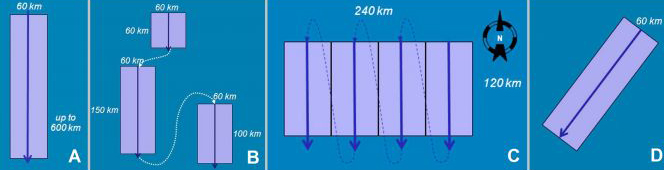
شکل ۷- ظرافت بالا سناریوهای پوشش مختلفی را ممکن می سازد.
نرخ بازدید نادیر ۲۶ روز است، اما اگر SPOT 6& 7 بصورت متقارن کار کنند و مناطق خارج از دید نادیر در همان عبور برداشت شوند، ظرافت در نشانه روی اجازه می دهد که هر مکان یکبار در روز اخذ شود و سنجنده ها می توانند به مناطقی درون یک دالان با عرض ۱۵۰۰ کیلومتری نشانه بروند. در خلال نماهای به سرعت در حال تغییر تا ۷۵۰ کیلومتری به سمت چپ و راست راستای نادیر، ۱۱ نمای ۶۰*۶۰ کیلومتری در یک بخش مداری ۱۰۰۰ کیلومتری قابل اخذ هستند. بیش از یک تارگت در همان عبور و در همان عرض جغرافیایی نیز قابل اخذ شدن است (شکل ۷C)، در حالیکه عوارض ممتد مانند خطوط انتقال نیرو، رودخانه ها و یا سایر دالان ها ممکن است دنبال شوند (شکل ۷D). ظرافت امکان تصویربرداری استریو در راستای مسیر و همچنین استریو سه تایی را نیز فراهم می کند. استریو سه تایی انسداد را کاهش می دهد، بنابراین کیفیت DEM بهبود می یابد (شکل ۸).
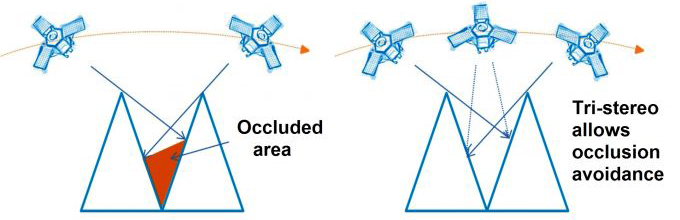
شکل ۸- تفاوت میان استریو و استریو سه گانه.
۱۲ بیت در هر باند (۴۰۹۶ مقدار) جزئیاتی که تحت پوشش ابرها، و سایه قرار دارند و یا بافت های ریزی دارند، نظیر تپه های شنی و یا یخ، را بهبود می بخشد. بطور معمول، تصاویر در راستای شمال به جنوب هستند، یعنی خطوط اسکن عمود بر نادیر نیستند. برای حفظ راستای شمال به جنوب، سنجنده ها باید به آهستگی از نادیر فاصله بگیرند، اما در یک لحظه بخصوص سنجنده ها باید به موقعیت ابتدایی خود بازگردند. بنابراین، طول بیشینه یک نوار شمال به جنوب ۶۰۰ کیلومتر است (شکل های ۷ A و B). استفاده از پیش بینی های آب و هوایی در برنامه ریزی برای ماموریت، از اخذ نماهای پنهان شده زیر ابرها جلوگیری می کند. جدول ۲ مشخصات طیفی و مکانی SPOT و Pleiades را نشان می دهد.
| Pleiades 1A&1B | SPOT 6&7 | |
| ۰٫۴۸-۰٫۸۳ | ۰٫۴۵-۰٫۷۴۵ | پانکروماتیک |
| ۰٫۴۳-۰٫۵۵ | ۰٫۴۵-۰٫۵۲ | آبی |
| ۰٫۴۹-۰٫۶۱ | ۰٫۵۳-۰٫۵۹ | سبز |
| ۰٫۶-۰٫۷۲ | ۰٫۶۲۵-۰٫۶۹۵ | قرمز |
| ۰٫۷۵-۰٫۹۵ | ۰٫۷۶۰-۰٫۸۹۰ | مادون قرمز نزدیک |
| ۲۰ کیلومتر | ۶۰ کیلومتر | عرض نوار |
| ۰٫۵ متر | ۱٫۵ متر | فاصله نمونه برداری زمینی باند پان |
| ۲ متر | ۶ متر | فاصله نمونه برداری باندهای طیفی |
جدول ۲- باندهای طیفی (میکرومتر)، عرض نوار و فواصل نمونه برداری زمینی SPOT 6&7 و Pleiades 1A& 1B

شکل ۹- این تصویر ۴۰ سانتیمتری WorldView-3 از یک کشتی در حال بارگیری در ریو دو ژانیرو برزیل، ساختار شبکه فلزی بازو های جرثقیل را نشان می دهد.
WorldView-3 که همان مشخصات طیفی WorldView-2 (جدول ۳) را دارد در ۸ اکتبر ۲۰۰۹ پرتاب شده است، اما تصاویری با یک GSD بالاتر ۳۱ سانتیمتری به جای ۴۶ سانتیمتر در حالت پان و ۱٫۲۴ سانتیمتر به جای ۱٫۸۵ سانتیمتر در حالت چندطیفی را تهیه می کند (شکل ۹). تمامی شکل ها به نادیر اشاره دارند. WorldView-3 به امکانات سنجش طیفی خود ۸ باند مادون قرمز موج کوتاه (SWIR) با یک GSD 3.7 متری و ۱۲ باند CAVIS (ابرها، ریزگردها، بخارآب، یخ و برف) با GSD 30 متری نیز افزوده است. ظرفیت پوششی WorldView-2 1 میلیون کیلومتر مربع در روز است، و برای WorldView-3 این عدد برابر با ۶۸۰۰۰۰ کیلومتر مربع است. به عبارت دیگر، افزایش GSD با ضریب ۱٫۴۸ پوشش روزانه را با همان ضریب کاهش می دهد. پیکربندی چهار ماهواره ای با یک GSD بهتر از ۵۰ متر اجازه اخذ ۶۰% سطح زمین را بصورت ماهانه و بازدید روزانه نواحی یکسان را می دهد.
| میکرومتر | |
| ۰٫۴-۰٫۸۰ | پان |
| چندطیفی | |
| ۰٫۴-۰٫۴۵ | ساحلی |
| ۰٫۴۵-۰٫۵۱ | آبی |
| ۰٫۵۱۰-۰٫۵۸ | سبز |
| ۰٫۵۸۵-۰٫۶۲۵ | زرد |
| ۰٫۶۳-۰٫۶۹ | قرمز |
| ۰٫۷۰۵-۰٫۷۴۵ | لبه قرمز |
| ۰٫۷۷-۰٫۸۹۵ | NIR1 |
| ۰٫۸۶-۱٫۰۴ | NIR2 |
جدول ۳- باندهای طیفی WorldView-2 و WorldView-3
نتیجه
داده نمی تواند از هوا به وجود آید. من برای قوت قلب دادن به نقشه بردارانی که ممکن است ترس غیرمنصفانه ای در ارتباط با در خطر در انقراض بودن حرفه شان داشته باشند، با نقل قولی از DigitalGlobe بحث را به اتمام می رسانم: “شما نمی توانید داده را از هیچ تولید کنید و پیشرفت های نرم افزاری نمی توانند بر قوانین و فیزیک غلبه کنند”.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}