

دوربین رقومی UltracamD
مقدمه
جایگزین کردن دوربین های رقومی با دوربین های آنالوگ از جولای ۲۰۰۰ با معرفی ADS-40 توسط شرکت LH که در حال حاضر شرکت Leica نامیده می شود آغاز شد. بعد از آن DMC به وسیله Z/I Imaging به بازار آمد و در می ۲۰۰۳، UltracamD معرفی شد. UltracamD یک دوربین رقومی با فرمت بزرگ ۹۰ مگاپیکسلی است. علت اصلی ورود دوربین های دیجیتالی مزیت های اقتصادی آن ها می باشد. در دوربین های رقومی دیگر نیازی به وجود کاربر جهت چاپ و ظهور فیلم و نیز اسکن کردن آن نبوده و علاوه بر این مزیت ها علت اصلی استفاده از دوربین های رقومی، افزایش تعداد پوشش های رو به جلو در فتوگرامتری بود؛ به عبارتی می توان به راحتی پوشش را زیاد کرد، زیرا بدون هیچ گونه هزینه ای، می توان تصاویر زیادی اخذ کرد و به پوشش دلخواه دست یافت. تکنیک های اتوماسیون در دوربین های رقومی به وجود آمدند. در روش های سنتی از برخورد دو اشعه تصویر ۳ بعدی را به وجود می آوردیم در اینجا با چندین اشعه رو به رو هستیم پس نرم افزارهای موجود می بایست خود را با این شرایط وفق می دادند علاوه بر آن در دوربین های رقومی با وجود تصاویر پانکروماتیک می توان به رزولوشن هندسی بسیار بالایی دست یافت و با وجود تصاویر چندطیفی می توان در کنار رزولوشن هندسی بالا تصاویر رنگی (سبز، قرمز، آبی و مادون قرمز نزدیک) هم داشت.
ساختار دوربین های UltracamD
سنسور UltracamD شامل ۸ دوربین مستقل است که ۴ تا از آن ها تصویر پانکروماتیک فرمت بزرگ با سایز۷۵۰۰×۱۱۵۰۰ پیکسل تهیه می کنند. ۴ دوربین دیگر جهت ایجاد تصاویر چند طیفی (سبز ، قرمز ، آبی و مادون قرمز نزدیک) استفاده می شوند (شکل ۱).

شکل۱: دوربین دیجیتال بزرگ فرمت UltracamD
قسمت پانکروماتیک دوربین شامل ۹ سنسور CCD با فرمت متوسط است و قسمت Multi-Spectral هم شامل ۴ سنسور CCD است. تصویر پانکروماتیک ۱۱۵۰۰ پیکسل در راستای across track و ۷۵۰۰ پیکسل در راستای along track دارد. فاصله کانونی این دوربین ها ۱۰۱٫۴۰۰ میلیمتر، اندازه آرایه های سنسور سی سی دی ۶۷٫۵×۱۰۳٫۵ میلیمتر و اندازه پیکسل های آن ۹ میکرومتر است. رنگ به طور همزمان در یک اندازه فریم ۲٫۷×۴ کیلوبایت پیکسل که شامل رنگ های قرمز و سبز و آبی و مادون قرمز است ثبت می شود (جدول ۱).

جدول ۱: مشخصات دوربین UltracamD
در دوربین های پانکروماتیک یک دوربین به عنوان دوربین Master و ۳ تای دیگر به عنوان دوربین های Slave درنظر گرفته می شوند که باید نسبت به دوربین Master توجیه شوند. گپ های بین ۴ سنسور توسط ۳ تصویر دیگر پر می شود ارتباط بین این تصاویر بوسیله کالیبراسیون مشخص می شود که عمل کالیبراسیون توسط نقاط گرهی با باندل اجستمنت انجام می پذیرد. عمل اتصال بین تصاویر که نتیجتاً یک ثصویر با فرمت بزرگ را ایجاد می کند Stitching نامیده می شود (شکل ۲).

شکل ۲: ۹ آرایه CCD جهت شکل گیری تصویر نهایی به یکدیگر Stitch می شوند
با استفاده از (FMC) به وسیله Time-Delay Integration می توان مدت زمان Exposure را در شرایطی که مقدار نور کم است (در مناطق تاریک) افزایش داد. زمان Exposure می تواند از ۲ تا ۱۷ میلی ثانیه باشد.
کالیبراسیون هندسی دوربین های UltracamD
UltracamD یک دوربین متریک می باشد که برای کاربردهای دقیق فتوگرامتری طراحی شده است و هندسه درونی آن به وسیله کالیبراسیون تعیین می شود. در کالیبراسیون این دوربین از معادلات شرط هم خطی استفاده می کنیم فاصله کانونی و مختصات نقطه اصلی اولین پارامترهایی هستند که در پروسه کالیبراسیون باید آن ها را تعیین کنیم. دومین مجموعه پارامترها شامل تصحیح اعوجاج شعاعی و مماسی است.
مجموعه سوم پارامترها شامل محل قرار گرفتن هر سنسور CCD در صفحه کانونی که هشت cones در آن واقع شده است می باشد، که جهت تعیین این پارامترها از باندل اجستمنت استفاده می کنیم. با استفاده از پارامترهای کالیبراسیون و پارامترهای توجیه داخلی تصویر حاصل هیچ گونه اعوجاجی ندارد.
تارگت های کالیبراسیون
تارگت های کالیبراسیون در زیرزمینی با ابعاد ۲۰۰×۲۲۰ ×۳۳۰ قرار دارند. ۳ ایستگاه دوربین ثابت در زیر زمین قرار داده شده است. ۲۴۰ نقطه بر روی تارگت ها قرار گرفته است که مختصات نقاط (x,y,z) را با دقت ۵۰ میکرومتر می دهند.
نقاط بر روی دیوار عقبی، دیوارهای کناری و سقف و کف اتاق قرار گرفته اند. ۴ نقطه اضافی در موقعیت مرکزی تارگت ها قرار دارد (شکل ۳).
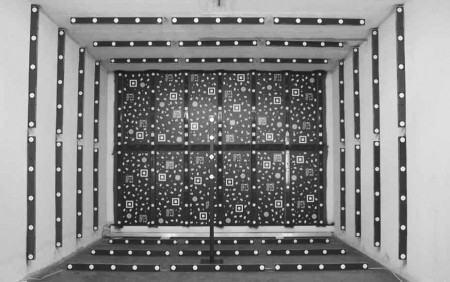
شکل ۳: تست فیلد کالیبراسیون. این تست فیلد شامل ۲۴۰ نقطه کنترل می باشد.
اخذ داده ها
تصاویری با ۳ دوربینی که به آن ها تیلت می دهیم اخذ می شوند. مجموعاً ۸۴ تصویر از این دوربین ها اخذ می شود (شکل ۴).

شکل ۴: نمایی از موقعیت ۳ دوربین (شکل سمت راست)، مجموعه ای از ۸۴ تصویر که به وسیله دوران و تیلت دادن به دوربین ها ایجاد شده است (شکل سمت چپ)
اندازه گیری مختصات تصویر
مختصات تصاویر به وسیله نرم افزارهای مخصوصی اندازه گیری می شود. در روش های دستی یک Zoom Window نمایش داده می شود و موقعیت نهایی تصاویر با تکنیک های پردازش تصویر به دست می آید. حدود ۱۴۰۰۰ موقعیت با استفاده از تصاویر پانکروماتیک و حتی بیشتر از این مقدار توسط تصاویر Multi-Spectral با ۸۴ تصویر به دست می آید. مختصات این نقاط با انحراف معیاری حدود ۱٫۳ میکرو متر به دست می آید.

شکل ۵: انحراف معیار مختصات تصاویر اندازه گیری شده از ۲۰۰ نقطه تارگت در ۸۴ تصویر در جهت x (تصویر بالایی) در جهت y (تصویر پایینی).
تخمین پارامترهای دوربین به وسیله سرشکنی کمترین مربعات
برای اجستمنت اندازه گیری های مختصات تصویر وتعیین پارامترهای دوربین از نرم افزار BINGO استفاده می کنیم پروسه اجستمنت شامل ۴ مرحله می باشد:
- محاسبه پارامترهای دوربین که شامل فاصله اصلی، مختصات نقطه اصلی و پارامترهای اعوجاج عدسی
- انتقال دادن نقاط تصویر به موقعیت های CCD
- بررسی میزان جابجایی باقیمانده در صفحه تصویر نیز بررسی میزان جابجایی به وسیله LUT
- تخمین پارامترهای انتقال بین دوربین ها جهت انجام مرحله Post-Processing (Stitching) در تصویر پانکروماتیک و اتصال تصاویر Multi-Spectral به تصاویر پانکروماتیک (pan sharpening)
افزیش پوشش
در تصاویری که با فتوگرامتری به روش سنتی انجام می گرفت ما از برخورد دو اشعه به پوشش ۶۰ درصد دست می یافتیم. اما با ورود سنسورهای رقومی تعداد تصاویر را بدون آن که هزینه ای را متحمل شویم می توانستم افزایش بدهیم. این مزیت امکان پوشش بیش از ۶۰ درصد را برای ما ایجاد می کند. با پوشش ۸۰ درصد هر نقطه زمینی ۵ مرتبه بر روی تصاویر ایجاد می شود. با پوشش ۹۰ درصد هر نقطه ۱۰ مرتبه ایجاد می شود در حالی که با پوشش ۶۰ درصد هر نقطه ۲٫۵ مرتبه بر روی تصاویر ظاهر می شود (شکل ۶). UltracamD 2700 تصویر را در هر ماموریت پرواز با نرخ بیش از یک فریم در هر ثانیه می تواند ایجاد کند بنابراین به پوشش ۸۰ درصد در بیشتر ماموریت هایش دست می یابد. در مناطق شهری کوچکتر حتی به پوشش ۹۰ درصد هم می توان دست یافت. این میزان پوشش باعث می شود که مثلث بندی هوایی Robust تری داشته باشیم علاوه بر آن DEM قوی می توان تولید کرد به طوری که همه قسمت های زمین پوشش دارند. با افزایش تعداد فریم ها در طول ماموریت پرواز Overlap بالایی به دست می آید با افزایش خطوط پرواز می توان پوشش عرضی را از ۳۰ درصد به ۶۰ درصد افزایش داد که در مناطقی که تراکم ساختمان ها زیاد می باشد قابل اعمال است اما هزینه اضافی ایجاد می شود افزایش پوشش طولی هزینه ای را در بر ندارد اما برای افزایش پوشش عرضی چون نیاز به طی کردن خطوط پرواز بیشتری می باشد هزینه در بر دارد.
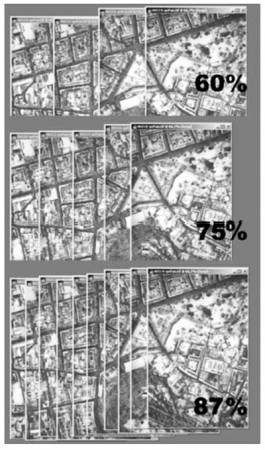
شکل ۶: نمونه ای از خطوط پرواز با پوشش روبه جلو ۶۰%، ۷۵%، ۸۷%
مقایسه کیفیت هندسی دوربین های دیجیتال UltracamD و آنالوگ
در اینجا جهت مقایسه کیفیت هندسی دوربین های دیجیتال UltracamD و آنالوگ تست های Image Matching ، Edge Response and Siemens Star و تست اندازه گیری میزان نویز را بر روی تصاویر آنالوگ و دیجیتال انجام می دهیم. دوربین UltracamD انتخاب شده جهت این تست دارای فاصله کانونی ۹ میلیمتر بوده و رزولوشن رادیومتریکی آن ۱۲ بیت می باشد. دوربین آنالوگ استفاده شده Minolta Dynax7 با میزان سیگمای ۱۳۵-۴۰۰ mm/f1:4.5-5.6 و تصاویر آنالوگ حاصل توسط UltraScan 5000 در ۵ ، ۱۰ ،۱۵ و ۲۰ میکرومتر اسکن شده اند محدوده دینامیکی آن ها ۱۶ بیت است. هر دو دوربین با کیفیت بالایی از لحاظ هندسی کالیبره شده اند.
اخذ تصاویر از طریق روش های Synchronous و Syntopic
یک دوربین شامل یک لنز Master می باشد که جهت تعریف سیستم مختصات تصویر به کار می رود به عبارتی ۳ دوربین Slave نسبت به این دوربین Master توجیه می شوند. در روش اول هر ۴ دوربین به طور همزمان از منطقه تصویربرداری می کنند. در روش دوم عملگر دوربین روش Syntopic را انتخاب می کند به طوری که یک دوربین Master و ۳ دوربین Slave نقطه اصلی یکسانی در فضای ۳ بعدی دارند. کلمه Topos یک کلمه یونانی است که به معنی محل می باشد در شکل ۸ تصاویری که از این روش اخذ شده اند را نمایش می دهد هر کدام از دوربین ها به فاصله ۷ سانتی متر از یکدیگر قرار گرفته اند و با یک تاخیر زمانی یک میلی ثانیه از یکدیگر تصویربرداری می کنند سرعت پرواز هم ۷۰ متر بر ثانیه در نظر گرفته شده است.

شکل ۸: مقایسه اخذ تصویر به دو روش Syntopic وSynchronous، در مد Synchronous ۴ تصویر در یک زمان اخذ می شوند اما در مد Syntopic تصاویر با فاصله زمانی حدود ۱ میلی ثانیه که متناسب با سرعت پرواز می باشد اخذ می شوند.
سنسورهای Multi-Spectral
یکی از مزیت های مهم دوربین های رقومی وجود تصاویر Multi-Spectral می باشد. در دوربین های UltracamD تصاویر پانکروماتیک با رزولوشن بالا را به طور همزمان با تصاویر Multi-Spectral می توان داشت. روشی که برای اتصال تصاویر Multi-Spectral به پانکروماتیک وجود دارد Pan Sharpen نامیده می شود. تصویر خروجی حاصل یک تصویر رنگی با رزولوشن بالا است. مزیت استفاده از تصاویر Multi-Spectral ثبت همزمان تصویر در همه باندها می باشد.
مقایسه خصوصیات رادیومتریک دوربین های آنالوگ و UltracamD
جهت انجام مقایسه ای بین دو دوربین UltracamD و RC20 تست های پرواز زیادی در اواخر پاییز در نزدیکی های ظهر انجام پذیرفت. در این تست به دلیل اینکه زاویه خورشید تقریباً ۲۰ درجه بوده است بنابراین شرایط روشنایی کاملاً ضعیف ارزیابی می گردد.
UltracamD of Geotec و RC20 از NLS به طور همزمان از منطقه تصویربرداری کردند. زاویه دید متوسط (۲۱۴ میلیمتر) برای RC20 در نظر گرفته شد، بنابراین وسعت تصویربرداری UltracamD و RC20 بر روی زمین تقریباً یکسان بود و زمان Exposure در جدول ۲ نشان داده شده است.

جدول ۲: پارامترهای به کار رفته در تصویر
تعداد تصاویر UltracamD بیش از ۸۰۰ عدد بود و تعداد تصاویر RC20 حدود ۱۰۰ عدد بود. GSD تصاویر UltracamD چهار و ۸ سانتی متر بود. در حالی که تصاویر RC20 با سایز پیکسل ۲۰ میکرومتر همان GSD را می داد. چنانچه سایز پیکسل را به ۱۰ میکرومتر کاهش دهیم که سایز پیکسل تصاویر UltracamD حدود ۹ میکرومتر می باشد GSD تصاویر RC20 به مقدار نصف GSD تصاویر UltracamDD کاهش می یابد.
روش اندازه گیری کیفیت رادیومتریک
در این تحقیق کیفیت رادیومتریکی تصاویر با توجه به مقادیر درجات خاکستری که توسط FGI معرفی شده محاسبه شده است. درجات خاکستری بر روی ۸ Panel با ۸ گام رنگ آمیزی شده و اندازه این Panel ها ۵m×۵m می باشد و انعکاسات اسمی ۵%، ۱۰%، ۲۰%، ۲۵%،۳۰%، ۴۵%،۵۰%،۷۰% را دارند (اشکال ۹ و ۱۰).

شکل ۹: نمایی از Panelهای که با ۸ گام متفاوت رنگ آمیزی شده اند

شکل ۱۰: مثالی از درجات خاکستری در تصاویر از بالا به پایین: RC20 pan 12 bit 20 μm ،UC hi-pan 16 bit ،UC lo-cir 16 bit
این تحقیق شامل اندازه گیری BRDF درجات خاکستری در آزمایشگاه می باشد. BRDF در آزمایشگاه تحت شرایط نور مصنوعی با اسپکتروگونیومتر اندازه گیری می شود (شکل۱۱).
BRDF = Bidirectional Reflectance Distribution Function

شکل ۱۱: اندازه گیری آزمایشگاهی درجات خاکستری
تمامی درجات خاکستری ۸ Panel با توجه به پارامترهای زیر توسط اسپکتروگونیومتر اندازه گیری می شوند:
زاویه نوردهی ۵۰ درجه نسبت به راستای زنیت، زاویه آزیموت ۰، ۱۰، ۲۰، ۳۰، ۵۰، ۷۰، ۹۰ و ۱۲۰ درجه، زاویه مشاهداتی از ۷۰+ تا ۷۰- درجه و تاریکترین و روشن ترین Panel با زاویه نوردهی ۷۰ درجه اندازه گیری شده اند. تارگت ها به وسیله لامپ ۸۰۰ واتی روشن شده اند.
برای هر کدام از Panel ها یک مقدار ثابت BRDF از طریق آزمایشگاهی به دست می آوریم. رابطه BRDF با فرمول (۱) بیان می شود:
(BRDF=R/IR (۱
در این رابطه R درجه روشنایی بر روی تصویر می باشد که قابل اندازه گیری است، IR را به دو طریق می توان به دست آورد:
- از طریق اندازه گیری با رادیومتر
- از طریق محاسبه
اختلاف این دو مقدار بیانگر خطای رادیومتریکی می باشد.
نمودارهای حاصل بیانگر این موضوع است که با تغییر میزان نور دهی و زوایای نوردهی میزان خطای رادیومتریکی RC20 بیشتر از UltracamD است و حتی UltracamD خطی تر است (اشکال ۱۲ و۱۳).

شکل ۱۲: درجات خاکستری اندازه گیری شده بر روی تصاویر UltracamD، تصاویر سمت چپ، تصاویر با رزولوشن بالا و تصاویر سمت راست، تصاویر با رزولوشن بالا می باشند. ترتیب کانال ها از بالا به پایین: قرمز، سبز، آبی و مادون قرمز.
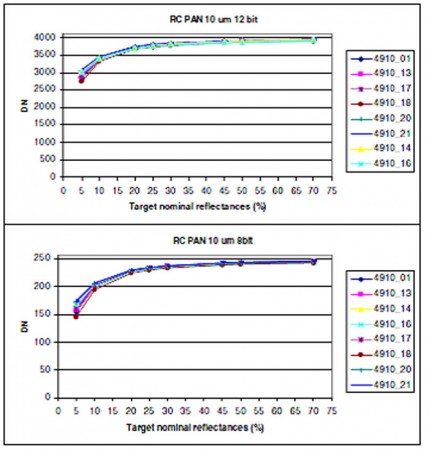
شکل ۱۳: نتایج حاصل از دوربین RC20
نتیجه گیری
همانند هر محصولی از این دست، دوربین UltracamD نیز دارای یک سری توانمندی ها و احیاناً یک سری نقایص و کمبودها می باشد. کیفیت رادیومتریکی بالای تصاویر، نسبت سیگنال به نویز بسیار بزرگ، توان Classification نسبتاً بالا در مقایسه با دوربین های آنالوگ، برطرف شدن مشکل اشیاء درون سایه در تصاویر این دوربین و فریم مبنا بودن این دوربین که خود منجر به اختیاری شدن سیستم GPS/INS می گردد را می توان در زمره برخی از توانمندی های این دوربین برشمرد. در عوض کوچکی نسبت باز به ارتفاع پرواز که جزء ذات همه دوربین های رقومی فریم دار است و منجر به کاهش دقت خصوصاً در مؤلفه Z می گردد. مهمترین نقیصه این دوربین به حساب می آید. که البته این کاهش دقت چشمگیر نبوده و قابل صرف نظر کردن می باشد. همچنین شکننده بودن ساختار هندسی این دوربین، لزوم کالیبراسیون دوره ای را مطرح می سازد که متأسفانه در مقالات و نشریات منتشر شده از سوی شرکت سازنده به هزینه و زمان آن اشاره ای نشده است. از طرفی برخی از ویژگی های دوربین UltracamD مانند مستطیلی بودن فریم آن و فریم مبنا بودن آن باعث شده است که با سیستم های قبلی انطباق بیشتر و استفاده از آن برای مصرف کنندگان مقبولیت بیشتری یابد.
در مقایسه با دوربین های هم رده مانند DMC تفاوت های بارزی وجود دارد که در ادامه به ذکر آنها خواهیم پرداخت:
- ارائه سیستم تصویربرداری به روش Syntopic که این نوع تصویربرداری در دروبین های DMC وجود ندارد.
- کوچکتر بودن نسبی فریم این دوربین در مقایسه با دوربین DMC
- پوشش زمینی و نسبت B به H در دوربین های DMC تا حدودی بهتر از UltracamD می باشد.
- در دوربین های UltracamD به دلیل Pixel Size کوچکتر نسبت به DMC توانایی بیشترین شارژ و در نتیجه نسبت سیگنال به نویز پایین تر و رنج دینامیکی پایین تر بوده و در نتیجه این عوامل حساسیت رادیومتریکی آن کمتر از DMC است.
- در مورد تصاویر باندهای چند طیفی به دلیل داشتن توان طیفی بالای سنجنده های این دوربین پدیده رنگی کردن تصاویر به خوبی صورت می گیرد. سنسورهای باندهای چند طیفی تقریباً ¼ سنسور باند پانکروماتیک می باشند.
برای شرکت در دوره فتوگرامتری برد کوتاه مهندس میثم رفیعی اینجا کلیک کنید.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ممنون از مقاله. کارتون عالیه لطفا با قدرت ادامه دهید به خصوص در رابطه با فتوگرامتری. دوربین های جدید بحث dem , …
ممنونیم
شما لطف دارید و ما رو بسیار دلگرم کردید
در ادامه مقاله های دیگری تحت عنوان “دوربین رقومی … چیست؟” منتشر خواهیم کرد
با ما همراه باشید و ما را به دوستان خود معرفی نمایید